3D-PRT23)歪み調整3
2016.07.26
最近疲れてます。やること多すぎです。体調悪いですorz
ダイヤルゲージでベッドの高さがはじき出されたら、
その値に合わせて適当な物をを挟んだりして
ベッドの高さを細かく調整すれば
Z0の座標では水平を維持できる。と言う話があります。
これはもっともな話で、とても簡単ではっきりと効果がでる方法だと思います。
しかし、しっかりフレームを作っていれば
ベッドは水平を保っているはずなのです。
それが出来ていないと言うことは、
柱やボトムフレームの組み立てに歪みがあるという事です。
作り方に問題が無いとしたら、部品そのものが歪んでいるのかもしれません。
その歪みの根本が分からないまま物を挟んで水平を出すと、
柱はベッドに対して垂直を維持できてないハズなので
高さのあるものを造形したときに問題が出てくる可能性があります。
そこで私は、フレームの歪みを出来るだけ少なくする努力をしてから
物を挟んで水平を出すことに決めました。
その方がやり遂げた感が強くて楽しいですしね。
では、折角ダイヤルゲージがあるのですから、

X・Y・Z・L・R・F + 中央
の7箇所について高さを調べてみたいと思います。
Radius 103.5 高さ305で計測
中央 1.34
Z 1.34
Y 1.34
X 1.34
R 1.10
F 1.16
L 1.40
ZYXが一致するのはキャリッジのネジを回して調整したため当然です。
しかし、RFLとの差がでていて、Lにおいては極端に違っているというのが更におかしい。
こんな事ってあり得るんですね・・
考え方を変えてみると、RFの2つが他の4カ所と違っている様にも見えます。
当初の四角形を印刷したときに1つの角が90度にならない問題は
少なからずここに原因がありそうです。
ベッドをネジ止めで固定しているのですが、
その圧力でネジの無いところにしわ寄せが来ている、そんなこともあるかもしれません。
う~ん
ダイヤルゲージを疑うわけでは無いのですが、
念には念をということで、数字が正しいのかを確認するために
何度か同じ測定をしてみましょう。
( ゚д゚) ・・・
(つд⊂)ゴシゴシ
(;゚д゚) ・・・
(つд⊂)ゴシゴシゴシ
_, ._
(;゚ Д゚) …!?
中央の値が毎回違う・・・・
ホームに戻し、エンドスイッチから下に降ろすだけの簡単なお仕事。
なのに、毎回高さが違うというのはなんで?(乾笑)
厚紙で隙間をチェックするだけでは全くわかりませんでした。
かれこれ10回以上は計測しましたが、振れ幅は-0.3~+0.3位のズレが起きます。
高さが安定しないと言うことは、
調整の根底が崩れてしまうので、造形の歪み問題は二の次になります。
困りましたね。
さて、まず何から手を付けていきましょうかね。
・
・
・
・
・
・
・
・
暫く考えて・・・
ダイヤルゲージの精度は0.1mmレベルで狂うことはまずあり得ないと思います。
製品マニュアルを見ると、全測定範囲指示誤差が16μmと書かれているので
mmに直すと0.016mm、0を基準に考えると±0.008mmというところでしょうか。
この値を信用するならば、やはり本体側に問題がある可能性が高いです。
何度か計測して分かってきましたが、
デコピンをするように(もちろん軽くですよ)エフェクターを弾いたあと、
測定すると値は大幅に狂います。
ということはどこかに遊びがあって、それが悪さをしている気がしてきました。
ちょっと対策に苦労しそうですね。
測定結果が毎回変わる理由を素人ながらに考えると、
可動部分が濃厚だと思います。
XYZの軸フレーム - リニアスライダー - エンドストップ
- プーリー - ベルト - キャリッジ - ロッドエンド
これらのどれかだと推測。
基本パーツの殆どですね ヽ(∀゚ )人( ゚∀)ノ ヒャッハー
仕方ありません、根本から見直しましょう。
まず軸フレームからです。
=======================================================
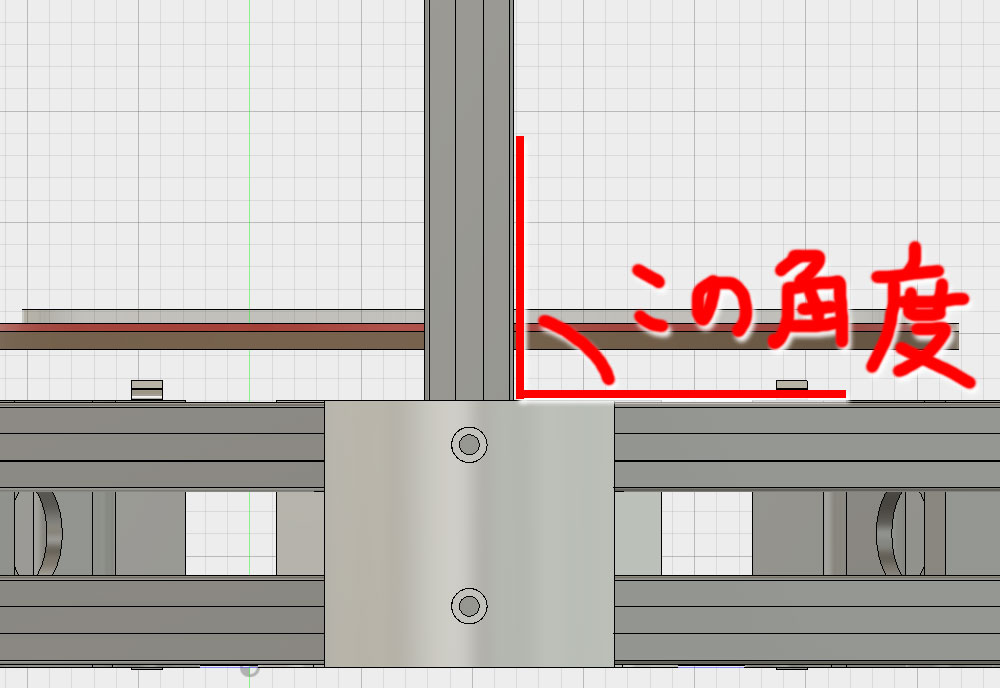
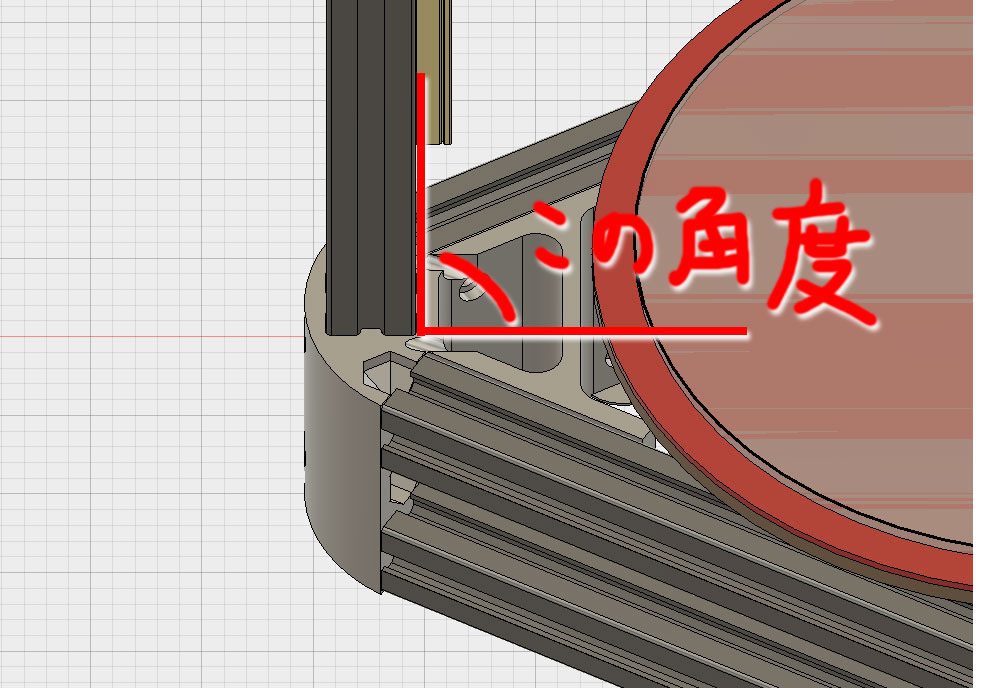
当初の問題が出たときにその原因と解決方法を考えていたのですが、
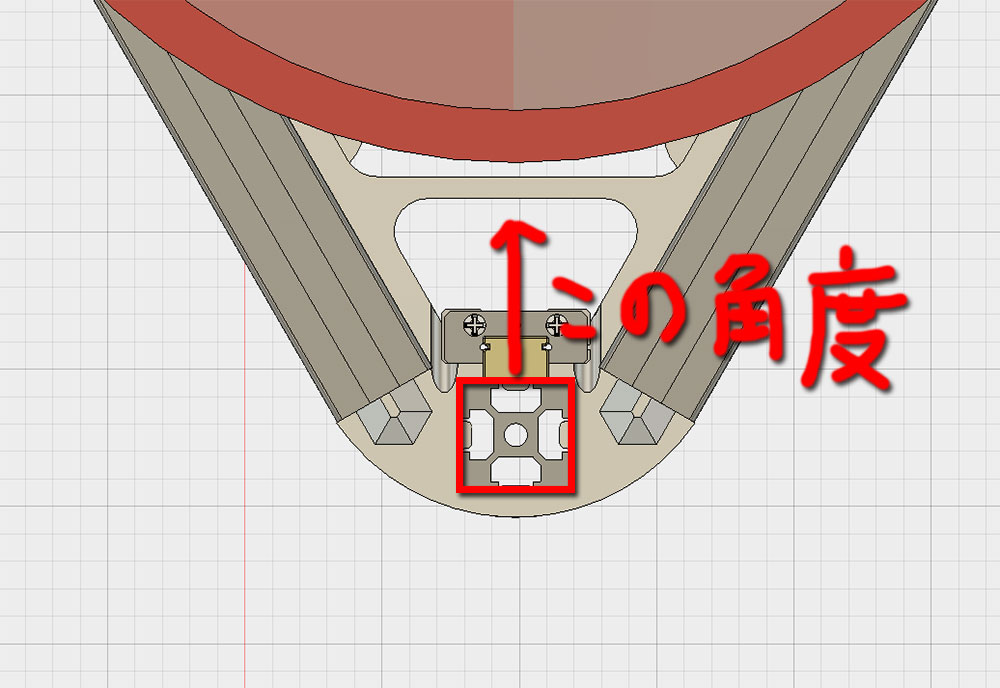
そのうちの一つに軸フレームが正確な角度になっていない為じゃないかと思いつきました。
図で言うとこの角度です。

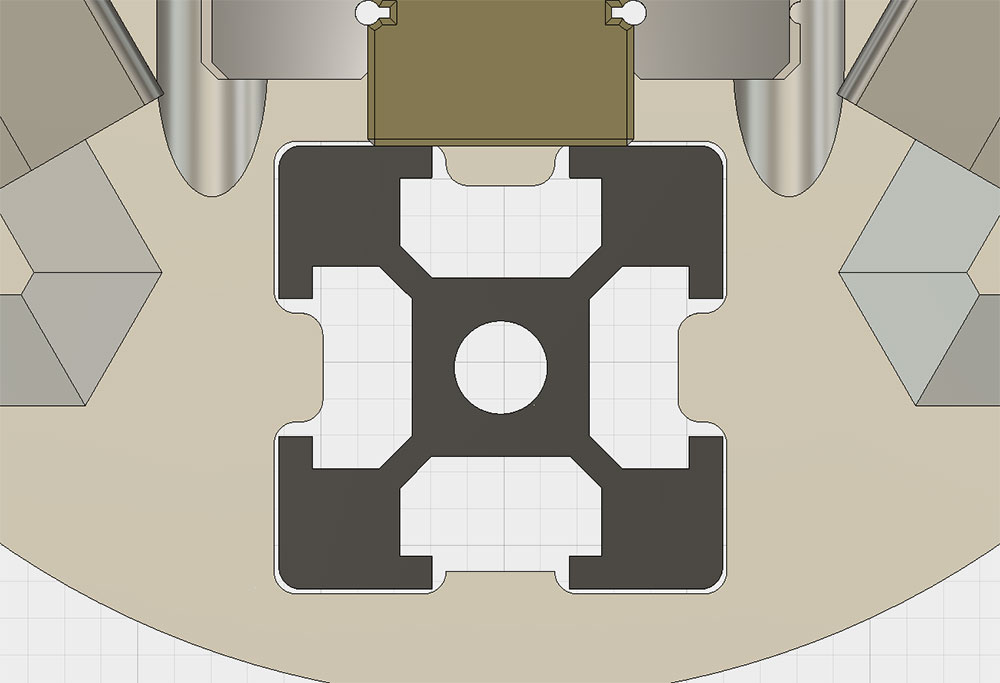
そもそもコーナーパーツとアルミフレームとの間には隙間が設けられています。
↓画像を拡大して見て下さい。
コーナーパーツの精度のばらつきを吸収するためだとは思いますが、
隙間があるということは、歪んで取り付けられてしまう事も当然あり得るわけです。
私のKosselは3Dプリンターで印刷された物なので、この隙間が正確にあるかも妖しいです。
まずこの不安要素を取り払います。
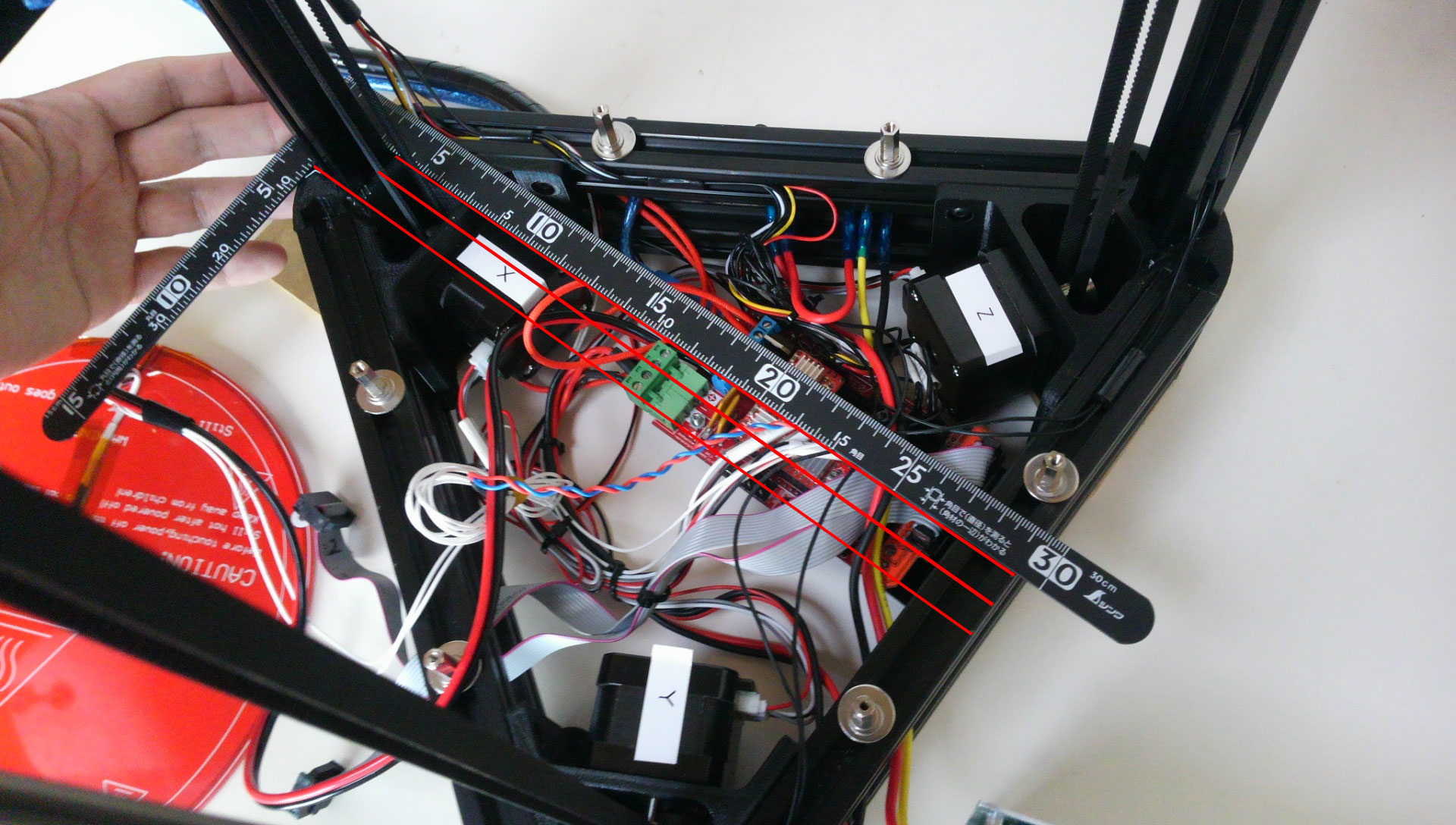
高精度な計測器が無いので、差し金でチェック。
まずはアルミフレームの捻りからチェック。
柱に差し金の内角をあて、対するアルミフレームの中央位置と比べて見る。
ずれていたら角度が合っていない。
↓こんな感じに角度を調べてみます。

結果、X,Y,Z軸全てが狂っていました。特にX軸については1センチ近く中央からそれていました。
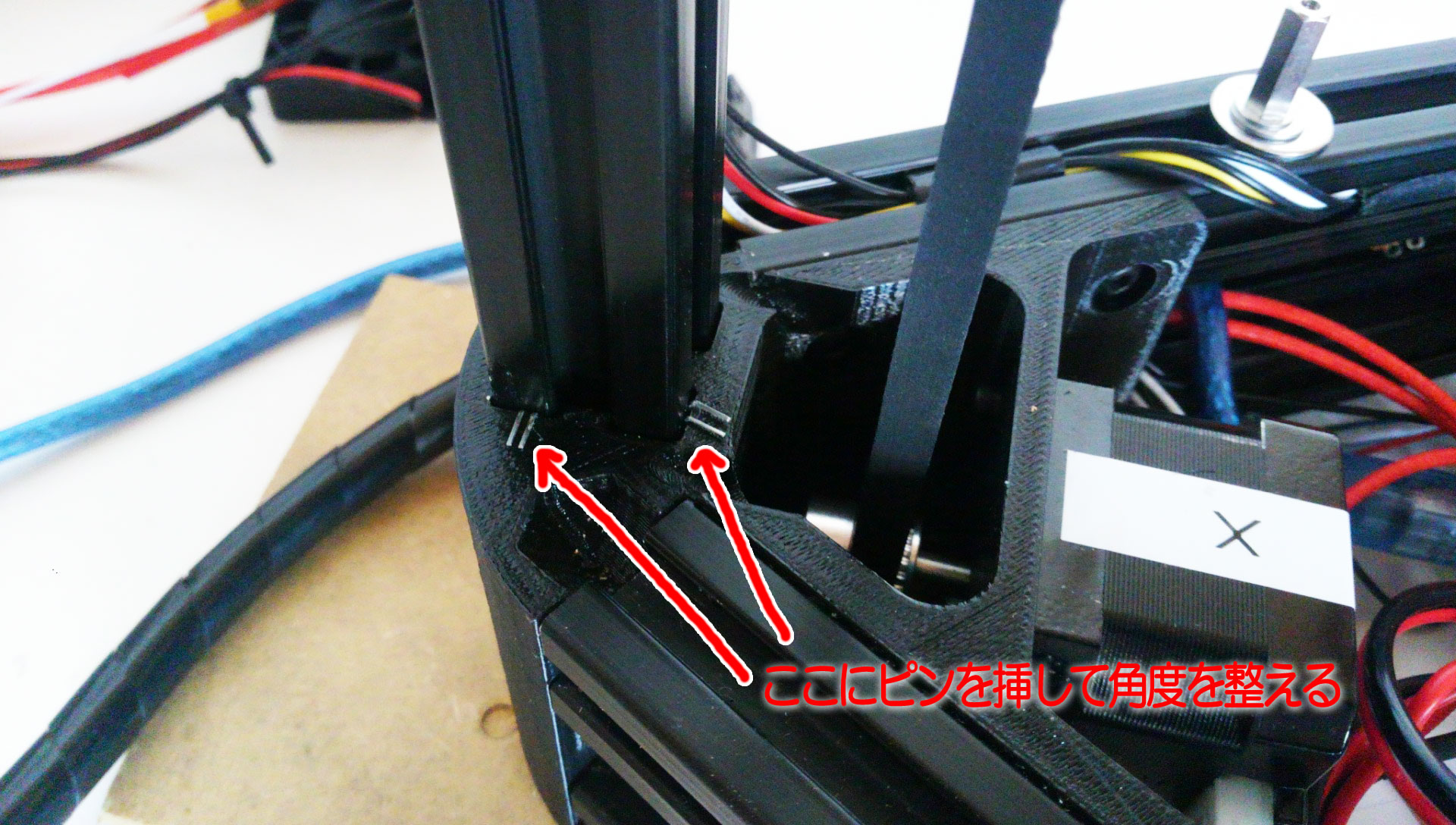
それぞれを正常な位置に角度調整しようと試みますが、固定するネジを締めると狂った角度に固定されます。
これはコーナーパーツの穴が歪んでいるんでしょうね・・
強制的に角度調整するために、隙間に薄く細い金属を差し込んで対処することにします。
私は、ホチキスの針を差し込むことにしました。

これでバッチリ。調整に時間が掛かりましたが、
ネジを締めても狂い無くキッチリ合いました。
ついでに、トップコーナーの高さも木を使って均等にしておきます。

=======================================================
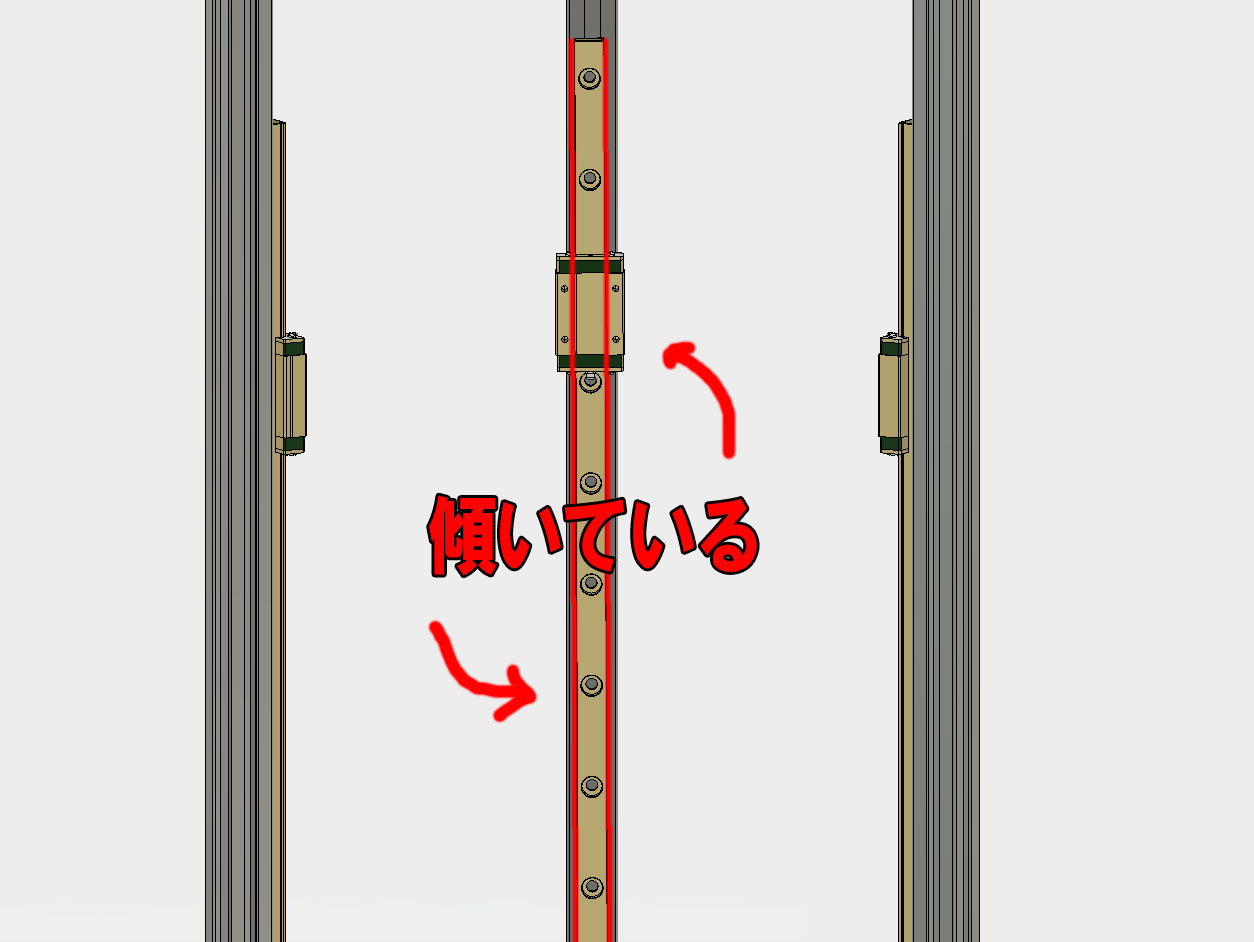
次はリニアスライダーにメスを入れます。
リニアスライダーはアルミフレームに固定されていますが、
M4ナットがキツキツで入るために、
斜めに固定されるなんてことは疑ってもみませんでした。
ですが実際測ってみると結構狂っているのでした。
こんな状況↓ですね。
ちょっと見にくいですがわかりますでしょうか?
両端では1mm近く傾いている軸もありました。
これを正確に取り付けることにします。
リニアスライダーは幅12mm。アルミフレームは20mm、その差は8mmです。
ということはアルミフレームの外枠から4mmの位置に
リニアスライダーを固定する必要があります。しかも平行に。
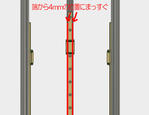
ノギスで4mmを測りながらねじ止めするのは困難です。
私は4mm角の角材をホムセンで買ってきて高さを均等にしました。
角材を利用すればリニアスライダーとアルミフレームは正確な並行関係になるはずです。
3軸とも正確に修正して次にいきます。
=======================================================
さて、次ですが、
ベルトやプーリーも気になっていることがありまして、原因追求と改善を考えていました。
その、気になっていることとは異音と振動です。
ホームからZ0に移動する時など、縦に大きく移動したときに起きる現象なんですが、
ベルトがブルルンと微振動する瞬間があるんです。音もビィィィィッィンと高周波っぽい音がしますし、
何かに干渉しているのは明確です。
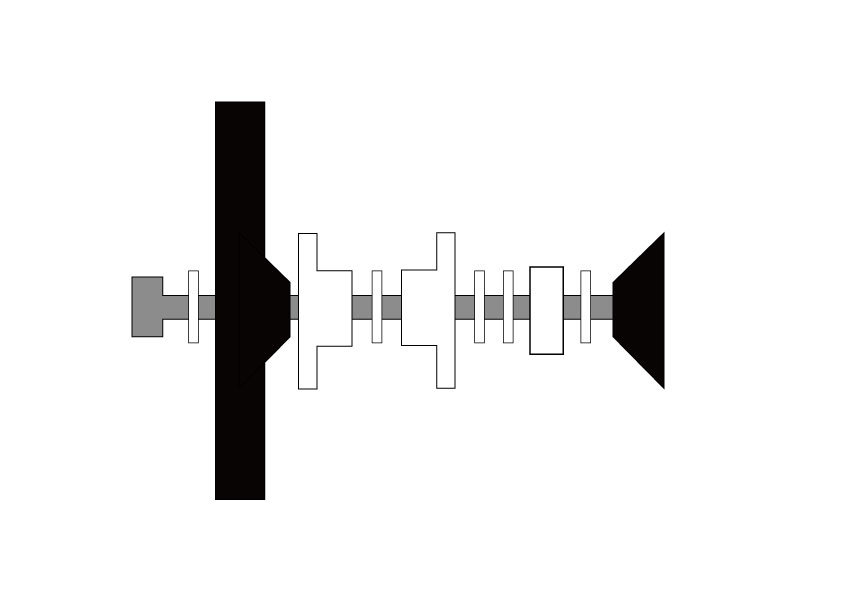
0.1mm刻みで、ホームポジションから最底面へ動かしてみたところ、
ベルトがプーリーの縁に乗り上がる瞬間があることが分かりました。
わかりやすく極端な例で図を描きます。

ベルトが赤線のように変形というか歪んでいるんです。
キャリッジが中央にいるときはそれほどプーリーやギア位置に緊張はないのですが、
上、または下に寄った時は、キャリッジの厚みでぐいぐいベルトを押しまくるので、
ベルトがプーリーの縁に乗り、ベルトに緊張状態が起きるのです。
これも脱調の一種なんでしょうか。
三角コーナーを作成するときにトップとボトムを比べて同じ位置に調整した事がありましたが、
結局はキャリッジも交えて調整しないと意味なかったわけです。
ガッカリダヨ!
まずキャリッジ部分のベルトの位置を定規等でで測ります。

この幅が上位置でも下位置でも同じなるようにプーリーとギアを調整していきます。
まずボトムコーナー内のモーターギアですが
こちらは簡単。六角レンチで芋ねじを緩め、

ギアの位置をベルトが定規の位置になるように動かし固定します。
次にトップコーナーのプーリーを調整。
プーリーは製作途中の時点で
幅に余裕を持たせるつもりで、結構端に寄せていたのですが、
それが仇となりました
今回の調整ではその余裕を取り払います。


最終的に↑写真のように組み上げました。
最後にキャリッジを手で動かして、ベルトが歪まないか確認して終了。
この調整を行った後は、変な高周波音や振動はなくなり、妙な座標ずれも軽減しました。
=======================================================
次はエンドストップに手を入れます。
毎度ホームポジションからZ0までの高さが違うということは、
エンドストップの反応にばらつきがある可能性が非常に高いです。
そこで何かミスがあるのは無いかとか、改善のための工夫はないかと考えてみます。
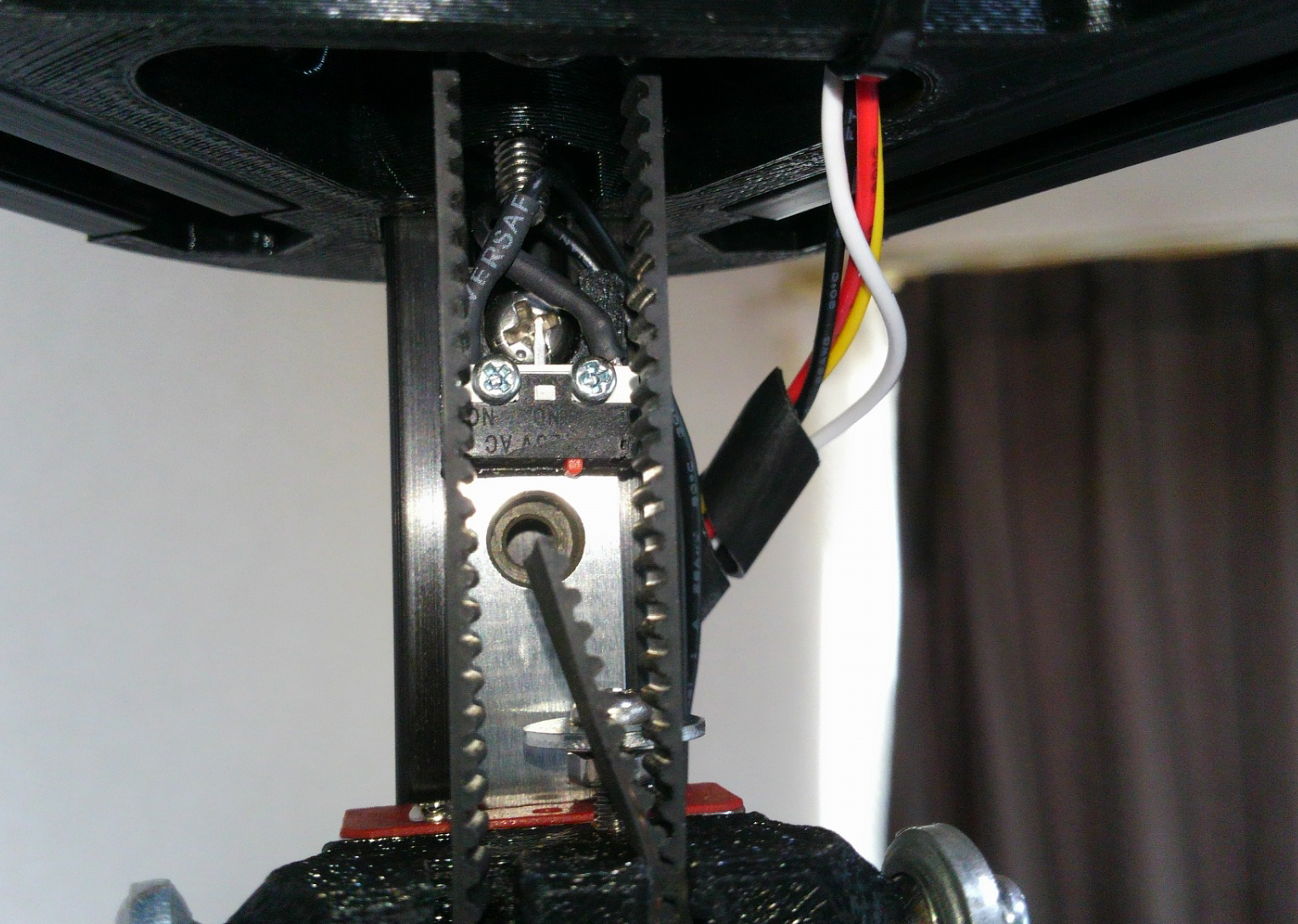
使用しているエンドストップは板バネタイプで、
その板をキャリッジのネジで押し込むことで反応しています。
その板バネはテコ原理でスイッチを押すという仕組みをとっており。
板バネの弾力具合によって押すタイミングが変わってしまう気がしてなりません。
なぜ板バネを押す仕様にしてるのかを考えた時に、
「スイッチへの激突を緩和するため」
が頭を横切りました。ほかには思いつきません。
ネット情報を集めてみたのですが、
余程の速度でホームに移動させないと上記のことは起きないという話です。
それじゃ板を極力活用しない形で遊びを減らして取り付けしてみました。
簡単に言うとスイッチをひっくり返して取り付けました。
しかもバネを取り払い、直に押すようにしました。
画像はとても見にくいですがこんな感じです↓

加工前

加工後
エンドストップの赤い部分が実際に押すスイッチなのですが、
この部分だけでも結構遊びがあるんですよね。
板バネがなくても、それほど心配ないのかなと・・。
ま、試してみないとわかりませんけどね。
バネがなくなることで、エンドストップと留め具との間に在った
M2ワッシャーを噛ませる必要もなくなり、直に取り付けることが可能になりました。
さらにファームウェアで、ホームポジションへ戻るときの速度を少し遅くしてみました。
何度かホーム移動を実験させましたが、
あくまで目視での評価ですが、
スイッチの反応が遅れ、遊びを飛び越えてエンドストップに激突!
なんてことはないように見えます。
一応、光学エンドストップも購入済みなのです。(3個で150円くらいでした。)
この方法で問題が発覚した場合には、後々、光学エンドストップに変えたいと思います。
=======================================================
次はベルトですね。
ベルトはいろいろ試行錯誤しているときに、
ロッド固定ネジで傷つけてしまっている箇所がいくつかあります。
ついでなので、ベルトも交換してしまいます。
切れ目に近いくらいの損傷なので、今のところは精度に影響なかったとしても、
後々破断に繋がっては危険極まりないので、その意味でも交換です。
=======================================================
キャリッジは今のところ手を入れられる部分がありません。
気になる事はあるんですが、今の段階ではどうにもならないので、
いったんスルーします。
=======================================================
最後にロッドエンドです。
ある程度Kosselの構造が分かってきた上でじっくり観察すると、
中華感漂う作りで実にチープです。
隙間が多すぎてカタカタ動くものもあれば、きっちり隙間なく滑らかに動くのもあります。
一番の原因はこれのような気がしてきました。
気になったら吉日。新しいロッドエンド+カーボンロッドを注文します。
大体1週間くらいで届きましたが、
届いたものはカーボンロッドにロッドエンドが接着されてた形で、4本/6本が使えない状況でした。(固定してあるのに、長さが均等じゃないし・・・)
その時のチェック動画がこれ。
この動画を販売元に送りましたところ、
あっさり「新しいの送るアルヨ!」と返事が・・
「ちゃんと精査してね!、ついでにカーボンロッドとロッドエンドを接着しないでね!」
と言ってみました、
待つことさらに1週間。
送られてきましたよ。新しいのが。
でもね、歪みや遊びが無いのは18個/24個 (゜ロ゜;)
結局、最初に送られてきた接着されてあるロッドを
ヒートガンで温め、使えるロッドエンドを取り外し、
新しく送られてきたものと合算で24個/24個を作りました。
最終的には国産のロッドエンドに変えなきゃいけないでしょうね。
中華パーツみたいに気軽に買えるような金額ではないでしょうが・・・
=======================================================
ついでにモータードライバーもA4988からDRV8825に交換します。
(本音は静音化で話題沸騰のTMC2100が欲しかったのですがちょっと高いですね。)
DRV8825にすることでどれだけ差が出るかわかりませんが、
ステップ数を従来の物より1/2にできるので
少しは座標移動の誤差が緩和されるかななんて甘い期待を・・・(;´・ω・)
ま、希望通りの性能アップを発揮してくれなかったとしても、
熱耐性はA4988よりあるという話ですので、損にはなりません。
ま1個130円くらいの部品ですし・・・
DRV8825とA4988は、電圧ボリュームの位置が逆になっています。
迂闊に同じ向きにつけてしまうと壊してしまうので注意。
背面に足の役割が書かれていますので、方向をしっかり把握してから差し替えます。
DRV8825の計算式は
電流I=電圧V/(5x抵抗Ω)
で導かれます。
届いたDRV8825は0.1Ωの抵抗を積んでいました。
座標軸用を1A、エクストルーダー用を1.2Aにしたいので、
設定電圧は0.5Vと0.6Vということになります。
それらをいつものようにテスタで調べながら調整っと。
あと、ファームウェアの変更も忘れてはいけません。
ステップ数がA4988では1/16だったのですが、DRV8825は1/32になります。
より精細になるわけですね。
XYZ_MICROSTEPS 16 ⇒ XYZ_MICROSTEPS 32
=======================================================
さて、ここまでやってどうでしょうかね・・・
実験結果は、次回に。
ダイヤルゲージでベッドの高さがはじき出されたら、
その値に合わせて適当な物をを挟んだりして
ベッドの高さを細かく調整すれば
Z0の座標では水平を維持できる。と言う話があります。
これはもっともな話で、とても簡単ではっきりと効果がでる方法だと思います。
しかし、しっかりフレームを作っていれば
ベッドは水平を保っているはずなのです。
それが出来ていないと言うことは、
柱やボトムフレームの組み立てに歪みがあるという事です。
作り方に問題が無いとしたら、部品そのものが歪んでいるのかもしれません。
その歪みの根本が分からないまま物を挟んで水平を出すと、
柱はベッドに対して垂直を維持できてないハズなので
高さのあるものを造形したときに問題が出てくる可能性があります。
そこで私は、フレームの歪みを出来るだけ少なくする努力をしてから
物を挟んで水平を出すことに決めました。
その方がやり遂げた感が強くて楽しいですしね。
では、折角ダイヤルゲージがあるのですから、
X・Y・Z・L・R・F + 中央
の7箇所について高さを調べてみたいと思います。
Radius 103.5 高さ305で計測
中央 1.34
Z 1.34
Y 1.34
X 1.34
R 1.10
F 1.16
L 1.40
ZYXが一致するのはキャリッジのネジを回して調整したため当然です。
しかし、RFLとの差がでていて、Lにおいては極端に違っているというのが更におかしい。
こんな事ってあり得るんですね・・
考え方を変えてみると、RFの2つが他の4カ所と違っている様にも見えます。
当初の四角形を印刷したときに1つの角が90度にならない問題は
少なからずここに原因がありそうです。
ベッドをネジ止めで固定しているのですが、
その圧力でネジの無いところにしわ寄せが来ている、そんなこともあるかもしれません。
う~ん
ダイヤルゲージを疑うわけでは無いのですが、
念には念をということで、数字が正しいのかを確認するために
何度か同じ測定をしてみましょう。
( ゚д゚) ・・・
(つд⊂)ゴシゴシ
(;゚д゚) ・・・
(つд⊂)ゴシゴシゴシ
_, ._
(;゚ Д゚) …!?
中央の値が毎回違う・・・・
ホームに戻し、エンドスイッチから下に降ろすだけの簡単なお仕事。
なのに、毎回高さが違うというのはなんで?(乾笑)
厚紙で隙間をチェックするだけでは全くわかりませんでした。
かれこれ10回以上は計測しましたが、振れ幅は-0.3~+0.3位のズレが起きます。
高さが安定しないと言うことは、
調整の根底が崩れてしまうので、造形の歪み問題は二の次になります。
困りましたね。
さて、まず何から手を付けていきましょうかね。
・
・
・
・
・
・
・
・
暫く考えて・・・
ダイヤルゲージの精度は0.1mmレベルで狂うことはまずあり得ないと思います。
製品マニュアルを見ると、全測定範囲指示誤差が16μmと書かれているので
mmに直すと0.016mm、0を基準に考えると±0.008mmというところでしょうか。
この値を信用するならば、やはり本体側に問題がある可能性が高いです。
何度か計測して分かってきましたが、
デコピンをするように(もちろん軽くですよ)エフェクターを弾いたあと、
測定すると値は大幅に狂います。
ということはどこかに遊びがあって、それが悪さをしている気がしてきました。
ちょっと対策に苦労しそうですね。
測定結果が毎回変わる理由を素人ながらに考えると、
可動部分が濃厚だと思います。
XYZの軸フレーム - リニアスライダー - エンドストップ
- プーリー - ベルト - キャリッジ - ロッドエンド
これらのどれかだと推測。
基本パーツの殆どですね ヽ(∀゚ )人( ゚∀)ノ ヒャッハー
仕方ありません、根本から見直しましょう。
まず軸フレームからです。
=======================================================
当初の問題が出たときにその原因と解決方法を考えていたのですが、
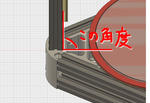
そのうちの一つに軸フレームが正確な角度になっていない為じゃないかと思いつきました。
図で言うとこの角度です。
そもそもコーナーパーツとアルミフレームとの間には隙間が設けられています。
↓画像を拡大して見て下さい。
コーナーパーツの精度のばらつきを吸収するためだとは思いますが、
隙間があるということは、歪んで取り付けられてしまう事も当然あり得るわけです。
私のKosselは3Dプリンターで印刷された物なので、この隙間が正確にあるかも妖しいです。
まずこの不安要素を取り払います。
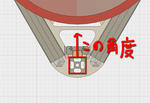
高精度な計測器が無いので、差し金でチェック。
まずはアルミフレームの捻りからチェック。
柱に差し金の内角をあて、対するアルミフレームの中央位置と比べて見る。
ずれていたら角度が合っていない。
↓こんな感じに角度を調べてみます。
結果、X,Y,Z軸全てが狂っていました。特にX軸については1センチ近く中央からそれていました。
それぞれを正常な位置に角度調整しようと試みますが、固定するネジを締めると狂った角度に固定されます。
これはコーナーパーツの穴が歪んでいるんでしょうね・・
強制的に角度調整するために、隙間に薄く細い金属を差し込んで対処することにします。
私は、ホチキスの針を差し込むことにしました。
これでバッチリ。調整に時間が掛かりましたが、
ネジを締めても狂い無くキッチリ合いました。
ついでに、トップコーナーの高さも木を使って均等にしておきます。

=======================================================
次はリニアスライダーにメスを入れます。
リニアスライダーはアルミフレームに固定されていますが、
M4ナットがキツキツで入るために、
斜めに固定されるなんてことは疑ってもみませんでした。
ですが実際測ってみると結構狂っているのでした。
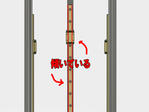
こんな状況↓ですね。
ちょっと見にくいですがわかりますでしょうか?
両端では1mm近く傾いている軸もありました。
これを正確に取り付けることにします。
リニアスライダーは幅12mm。アルミフレームは20mm、その差は8mmです。
ということはアルミフレームの外枠から4mmの位置に
リニアスライダーを固定する必要があります。しかも平行に。

ノギスで4mmを測りながらねじ止めするのは困難です。
私は4mm角の角材をホムセンで買ってきて高さを均等にしました。
角材を利用すればリニアスライダーとアルミフレームは正確な並行関係になるはずです。
3軸とも正確に修正して次にいきます。
=======================================================
さて、次ですが、
ベルトやプーリーも気になっていることがありまして、原因追求と改善を考えていました。
その、気になっていることとは異音と振動です。
ホームからZ0に移動する時など、縦に大きく移動したときに起きる現象なんですが、
ベルトがブルルンと微振動する瞬間があるんです。音もビィィィィッィンと高周波っぽい音がしますし、
何かに干渉しているのは明確です。
0.1mm刻みで、ホームポジションから最底面へ動かしてみたところ、
ベルトがプーリーの縁に乗り上がる瞬間があることが分かりました。
わかりやすく極端な例で図を描きます。

ベルトが赤線のように変形というか歪んでいるんです。
キャリッジが中央にいるときはそれほどプーリーやギア位置に緊張はないのですが、
上、または下に寄った時は、キャリッジの厚みでぐいぐいベルトを押しまくるので、
ベルトがプーリーの縁に乗り、ベルトに緊張状態が起きるのです。
これも脱調の一種なんでしょうか。
三角コーナーを作成するときにトップとボトムを比べて同じ位置に調整した事がありましたが、
結局はキャリッジも交えて調整しないと意味なかったわけです。
ガッカリダヨ!
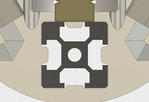
まずキャリッジ部分のベルトの位置を定規等でで測ります。

この幅が上位置でも下位置でも同じなるようにプーリーとギアを調整していきます。
まずボトムコーナー内のモーターギアですが
こちらは簡単。六角レンチで芋ねじを緩め、

ギアの位置をベルトが定規の位置になるように動かし固定します。
次にトップコーナーのプーリーを調整。
プーリーは製作途中の時点で
幅に余裕を持たせるつもりで、結構端に寄せていたのですが、
それが仇となりました
今回の調整ではその余裕を取り払います。

最終的に↑写真のように組み上げました。
最後にキャリッジを手で動かして、ベルトが歪まないか確認して終了。
この調整を行った後は、変な高周波音や振動はなくなり、妙な座標ずれも軽減しました。
=======================================================
次はエンドストップに手を入れます。
毎度ホームポジションからZ0までの高さが違うということは、
エンドストップの反応にばらつきがある可能性が非常に高いです。
そこで何かミスがあるのは無いかとか、改善のための工夫はないかと考えてみます。
使用しているエンドストップは板バネタイプで、
その板をキャリッジのネジで押し込むことで反応しています。
その板バネはテコ原理でスイッチを押すという仕組みをとっており。
板バネの弾力具合によって押すタイミングが変わってしまう気がしてなりません。
なぜ板バネを押す仕様にしてるのかを考えた時に、
「スイッチへの激突を緩和するため」
が頭を横切りました。ほかには思いつきません。
ネット情報を集めてみたのですが、
余程の速度でホームに移動させないと上記のことは起きないという話です。
それじゃ板を極力活用しない形で遊びを減らして取り付けしてみました。
簡単に言うとスイッチをひっくり返して取り付けました。
しかもバネを取り払い、直に押すようにしました。
画像はとても見にくいですがこんな感じです↓

加工前
加工後
エンドストップの赤い部分が実際に押すスイッチなのですが、
この部分だけでも結構遊びがあるんですよね。
板バネがなくても、それほど心配ないのかなと・・。
ま、試してみないとわかりませんけどね。
バネがなくなることで、エンドストップと留め具との間に在った
M2ワッシャーを噛ませる必要もなくなり、直に取り付けることが可能になりました。
さらにファームウェアで、ホームポジションへ戻るときの速度を少し遅くしてみました。
何度かホーム移動を実験させましたが、
あくまで目視での評価ですが、
スイッチの反応が遅れ、遊びを飛び越えてエンドストップに激突!
なんてことはないように見えます。
一応、光学エンドストップも購入済みなのです。(3個で150円くらいでした。)
この方法で問題が発覚した場合には、後々、光学エンドストップに変えたいと思います。
=======================================================
次はベルトですね。
ベルトはいろいろ試行錯誤しているときに、
ロッド固定ネジで傷つけてしまっている箇所がいくつかあります。
ついでなので、ベルトも交換してしまいます。
切れ目に近いくらいの損傷なので、今のところは精度に影響なかったとしても、
後々破断に繋がっては危険極まりないので、その意味でも交換です。
=======================================================
キャリッジは今のところ手を入れられる部分がありません。
気になる事はあるんですが、今の段階ではどうにもならないので、
いったんスルーします。
=======================================================
最後にロッドエンドです。
ある程度Kosselの構造が分かってきた上でじっくり観察すると、
中華感漂う作りで実にチープです。
隙間が多すぎてカタカタ動くものもあれば、きっちり隙間なく滑らかに動くのもあります。
一番の原因はこれのような気がしてきました。
気になったら吉日。新しいロッドエンド+カーボンロッドを注文します。
大体1週間くらいで届きましたが、
届いたものはカーボンロッドにロッドエンドが接着されてた形で、4本/6本が使えない状況でした。(固定してあるのに、長さが均等じゃないし・・・)
その時のチェック動画がこれ。
この動画を販売元に送りましたところ、
あっさり「新しいの送るアルヨ!」と返事が・・
「ちゃんと精査してね!、ついでにカーボンロッドとロッドエンドを接着しないでね!」
と言ってみました、
待つことさらに1週間。
送られてきましたよ。新しいのが。
でもね、歪みや遊びが無いのは18個/24個 (゜ロ゜;)
結局、最初に送られてきた接着されてあるロッドを
ヒートガンで温め、使えるロッドエンドを取り外し、
新しく送られてきたものと合算で24個/24個を作りました。
最終的には国産のロッドエンドに変えなきゃいけないでしょうね。
中華パーツみたいに気軽に買えるような金額ではないでしょうが・・・
=======================================================
ついでにモータードライバーもA4988からDRV8825に交換します。
(本音は静音化で話題沸騰のTMC2100が欲しかったのですがちょっと高いですね。)
DRV8825にすることでどれだけ差が出るかわかりませんが、
ステップ数を従来の物より1/2にできるので
少しは座標移動の誤差が緩和されるかななんて甘い期待を・・・(;´・ω・)
ま、希望通りの性能アップを発揮してくれなかったとしても、
熱耐性はA4988よりあるという話ですので、損にはなりません。
ま1個130円くらいの部品ですし・・・
DRV8825とA4988は、電圧ボリュームの位置が逆になっています。
迂闊に同じ向きにつけてしまうと壊してしまうので注意。
背面に足の役割が書かれていますので、方向をしっかり把握してから差し替えます。
DRV8825の計算式は
電流I=電圧V/(5x抵抗Ω)
で導かれます。
届いたDRV8825は0.1Ωの抵抗を積んでいました。
座標軸用を1A、エクストルーダー用を1.2Aにしたいので、
設定電圧は0.5Vと0.6Vということになります。
それらをいつものようにテスタで調べながら調整っと。
あと、ファームウェアの変更も忘れてはいけません。
ステップ数がA4988では1/16だったのですが、DRV8825は1/32になります。
より精細になるわけですね。
XYZ_MICROSTEPS 16 ⇒ XYZ_MICROSTEPS 32
=======================================================
さて、ここまでやってどうでしょうかね・・・
実験結果は、次回に。
 2016.07.26 00:10
|
2016.07.26 00:10
| 


トラックバックURL
トラックバック一覧





