3D-PRT26)キャリッジが届いた!
2016.09.22
先日ブログを更新して、翌日にはエフェクター、さらに昨日キャリッジが届きました。
お思いのほか到着が早かったです。

商品紹介ではよくわからなかったのですが、
ベルト止めワッシャーがM2ワッシャーと同サイズなんですが、
穴が一般的なM2ワッシャーより何故か大きすぎます。
辛うじてすっぽ抜けないレベルの穴で、安定感なく気持ち悪いです。
あえて特殊なワッシャーにしているかもしれないので、後から研究してみますが、
一般的なM2ワッシャーに交換したほうが気持ち的に落ち着きそうです。
エフェクターのホットエンド固定具はセットでないものがほとんどです。
付属しているか不明な場合は、送料込み100円くらいなので一緒に買っておくといいと思います。
買い忘れるとまた2週間ほど待たされます。
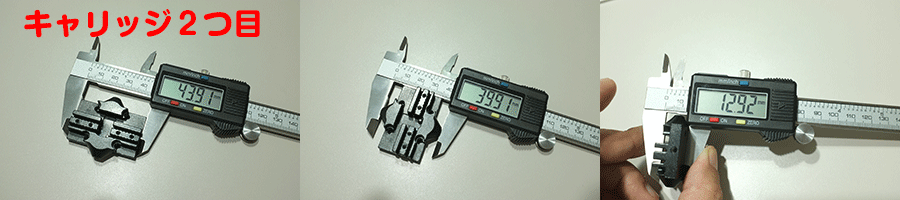
キャリッジのサイズを測ってみました。



うーん、思っていたのと違う・・・ 結構個体差があるのですね。
それでも3Dプリンターで印刷したものと比べると精度のケタが1つ違います。
厚みに関しては最大と最小の差が0.02mmなので
望み通りです。穴と穴の間が、各キャリッジと比べて最大0.05mm違うので
これがどう影響するか興味があります。
あと印刷に大きく影響が出そうな、穴の位置ですね。
私の持っている道具では正確に測れないのが残念です。
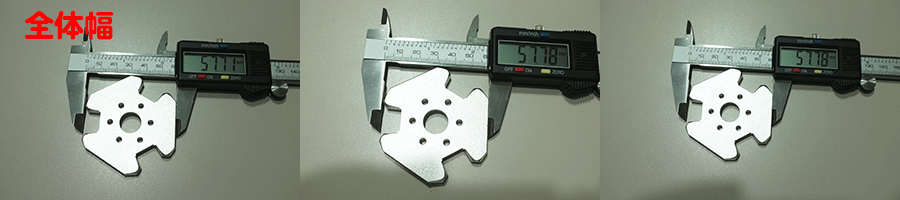
下にエフェクターのサイズを載せてますが、
穴と穴の距離が最大0.1mm違って結構適当です(笑)



大きく変わってしまうので、調整をまた最初から行わないといけませんね。
お思いのほか到着が早かったです。


商品紹介ではよくわからなかったのですが、
ベルト止めワッシャーがM2ワッシャーと同サイズなんですが、
穴が一般的なM2ワッシャーより何故か大きすぎます。
辛うじてすっぽ抜けないレベルの穴で、安定感なく気持ち悪いです。
あえて特殊なワッシャーにしているかもしれないので、後から研究してみますが、
一般的なM2ワッシャーに交換したほうが気持ち的に落ち着きそうです。
エフェクターのホットエンド固定具はセットでないものがほとんどです。
付属しているか不明な場合は、送料込み100円くらいなので一緒に買っておくといいと思います。
買い忘れるとまた2週間ほど待たされます。
キャリッジのサイズを測ってみました。


うーん、思っていたのと違う・・・ 結構個体差があるのですね。
それでも3Dプリンターで印刷したものと比べると精度のケタが1つ違います。
厚みに関しては最大と最小の差が0.02mmなので
望み通りです。穴と穴の間が、各キャリッジと比べて最大0.05mm違うので
これがどう影響するか興味があります。
あと印刷に大きく影響が出そうな、穴の位置ですね。
私の持っている道具では正確に測れないのが残念です。
下にエフェクターのサイズを載せてますが、
穴と穴の距離が最大0.1mm違って結構適当です(笑)

大きく変わってしまうので、調整をまた最初から行わないといけませんね。
 2016.09.22 10:02
|
2016.09.22 10:02
| 


3D-PRT25)テスト印刷&ソフトウェア調整
2016.09.19
デルタ型3Dプリンターについて、
今できるハード的調整はやりつくしました。
疑わしいところはまだありますが、
これ以上はキャリッジやエフェクターの交換になりますので、
部品調達を行ってますが、それまで間が開きますので
一度区切りをつけます。
ということでテスト印刷をしたくなってきました。
どれくらい精度が上がっているのか気になりますよネ
調整用にいろいろ変更してますからね、
元に戻すのもちょっと面倒ですよ。
ノズルに交換して、さて動作確認。
って、アレアレアレ? ( ˘•ω•˘ ).。oஇ
液晶に「MINTEMP ERROR」
が出て先に進まない・・・・・。
また故障かよぉーーー
ヒートブロックを巻いてたカプトンテープを剥し、
綺麗に束ねていた配線とチューブをほどく・・
そして、サーミスタを交換。
正常に動作を確認。
そしてまた綺麗に纏める。メンドクサイ・・・
サーミスタが壊れやすいとは聞いていましたが、
まさか本当に壊れるとは思ってもいませんでした。
予備のサーミスタを買っておいてよかったよ
こまったときの予備はやはり必要だね!・・( ・ㅂ・)و ̑̑ グッ !
これで印刷できるわー。
では90mmX90mmの評価用モデルを印刷してみます。
http://www.thingiverse.com/thing:13441
XYZ-Circle_Cal_-_90mm.stl
印刷を実行!・・・・・・・ ん? ( ˘•ω•˘ ).。oஇ
ん?吐出されるフィラメントの量が異様に少ない
またもやトラブル発生です。オオスギダヨ!
ノズル詰まってるのかな?と疑ってみましたが、
原因はすぐ判明、モータードライバをA4988からDRV8825にしたことで
エクストルーダーのステップ量が変わってしまっていたこと。
XYZ_MICROSTEPSを32にするだけで
エクストルーダーも大丈夫だべ?とタカをくくっていたら
MarlinのConfiguration.hに
DEFAULT_AXIS_STEPS_PER_UNIT {XYZ_STEPS, XYZ_STEPS, XYZ_STEPS, 150}
って書いてあることに気が付きます。エクストルーダーだけ数字が直書きじゃないですかー orz
XYZ_STEPって本当に軸だけの設定だったのね・・・
150を倍の300にして直接修正っと。これで解決。
気を取り直して再印刷です。
吐出量も安定して印刷が始まりました・・・が、またもやトラブル発生。 ( ˘•ω•˘ ).。oஇ
途中でエクストルーダーが止まったり動いたり不安定だ。
このような症状は、ドライバーの熱暴走ですなぁ・・・。
電圧の調整を行って・・
今は0.4Vまで下げてます。
はぁ、もう大丈夫だろう。
挫けず印刷っと。
そのときの動画はこちら(長いので最初だけ)
おおお、なんか精密感が増してる気がする。
印刷終了後、前に出力したものと比べてみます。
どちらも0.2mm積層でCuraEngineでスライスしました。
設定はデフォルトのまま。特に弄ってません。

左が古い物、右が今回印刷した物
明らかにきれいに印刷されてますね。
角もキレイにまとまってますし、反ってもいません。
塗りつぶしの処理も粗がなく見事に整列していますね。
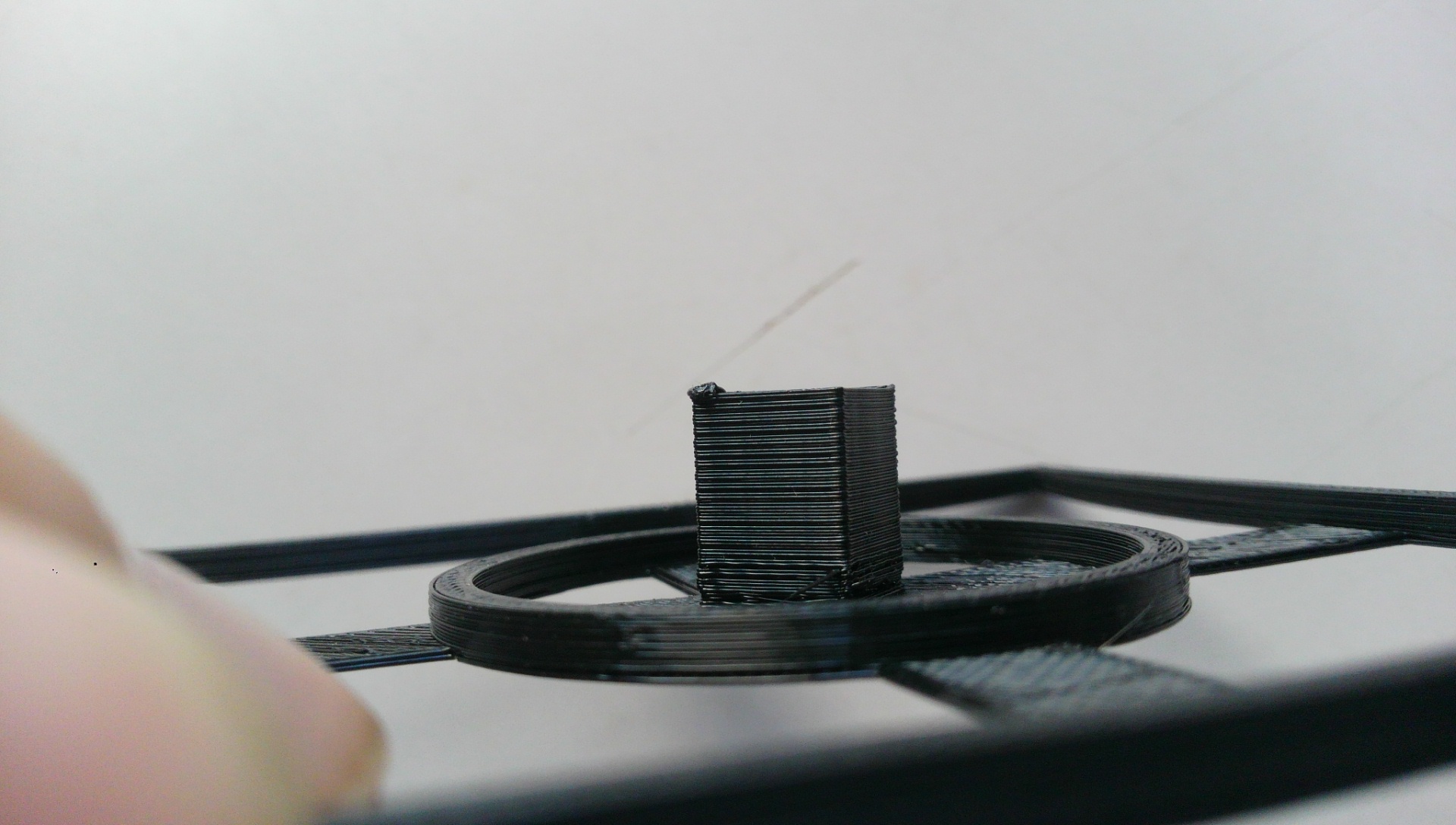
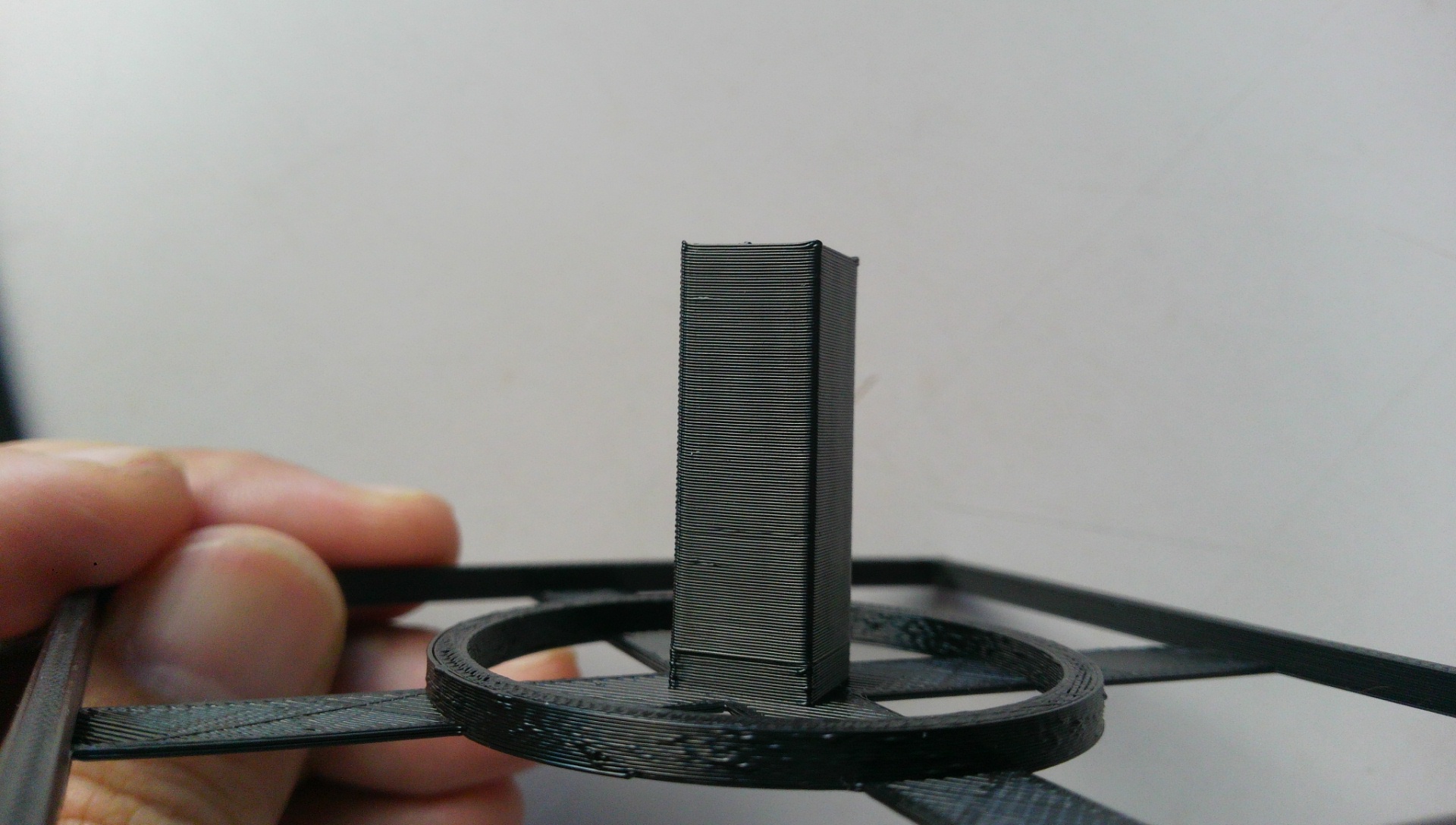
ついでにタワー部分も拡大してます。


前作のタワーは、積層がはっきりしていて、まさにシマシマ。
調整後のは、同じ0.2mm積層にもかかわらず、
正確に積みあがっている感がしっかりしています。
ロッドの遊びが少なく、求める座標へ的確に動いているのがこれでよくわかりますね。
所々にブツブツができてますが、これはスライサーの調整でなんとかなるでしょう。
造形物の美しさは十分満足いくところまで来ました。
あとは、設計通りの再現性ですが、これは組み立て直後に行った、
角度チェックをもう一度やってみましょう。

スキマあるやん! ガッカリダヨ! (´・ω・`)ショボーン
きっちり90度になり切れてない・・・
およそ0.5mmほどかな。
あれだけ、ハード周りを弄ったのに、結局最初の問題は解決できてないのか・・・ orz
だが、メゲナイよ!
最終手段のソフト調整で何とかするさね。
数学的なことは苦手なのであまり手を出したくなかったのですが、
そうも言ってられなくなってきました。
デルタ系のプリンターで高精度目指すのなら、三角形の寸法を測る必要があります。
そこで先人が作ったSTLを利用してデータを取得してみたいと思います。
それがこちら。
http://www.thingiverse.com/thing:745523
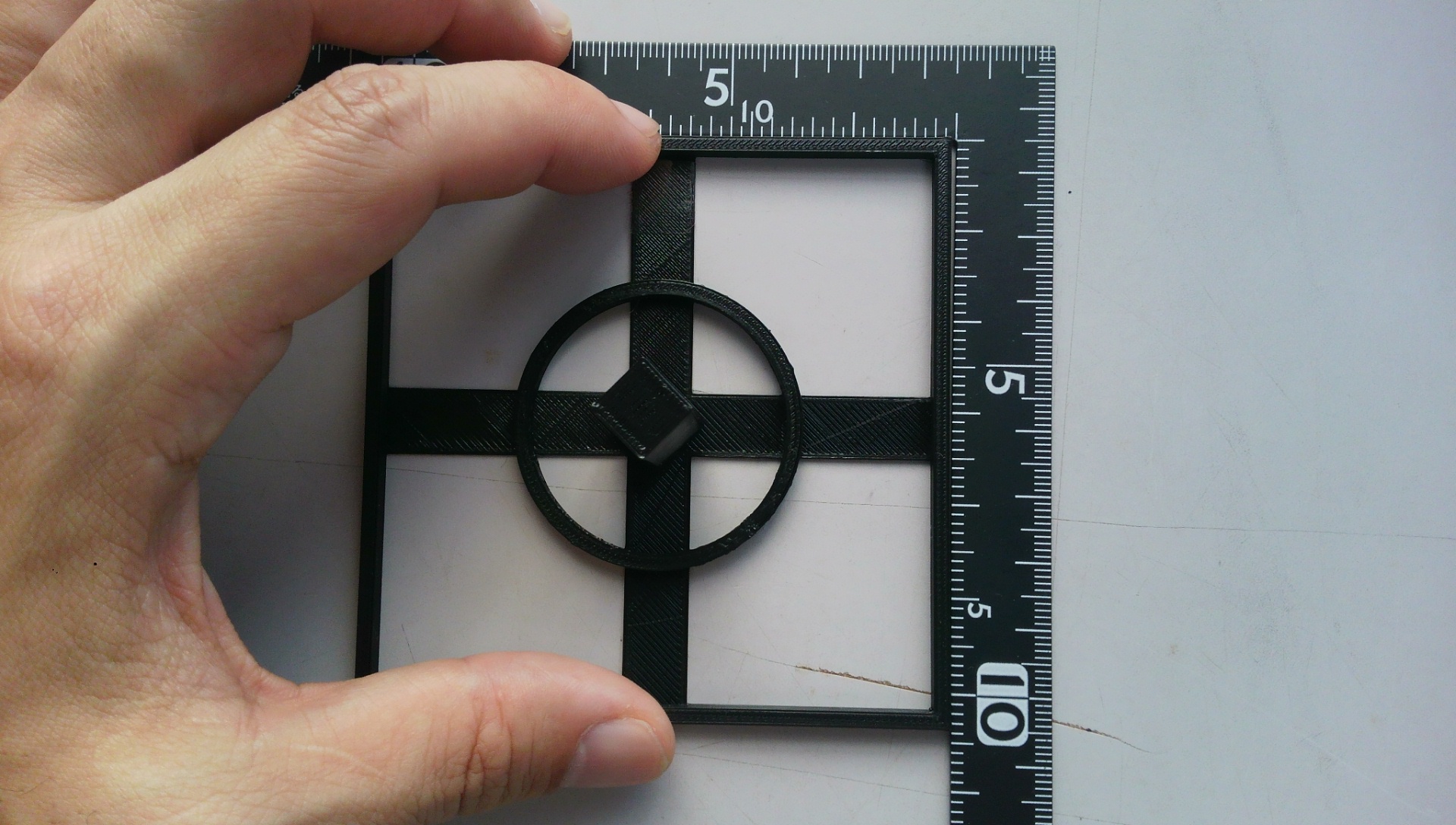
早速印刷してみます。
STLの作者が同梱している角度チェッカーが少々見にくいので、
そこだけ自分で作りました。
http://randol-news.net/download/checker.pdf
で、照らし合わせてみたのがコレ

写真でみると正確に出ているようにも見えますが、
肉眼でじっくり見ると、Y軸の角度が120.5に、
つまり0.5度ほど傾いているように見えます。
こちらをソフト的に修正してみましょう。
MarlinのConfiguration.hを開いて、
#define DELTA_TOWER1_X -SIN_60*DELTA_RADIUS
#define DELTA_TOWER1_Y -COS_60*DELTA_RADIUS
#define DELTA_TOWER2_X SIN_60*DELTA_RADIUS
#define DELTA_TOWER2_Y -COS_60*DELTA_RADIUS
#define DELTA_TOWER3_X 0.0
#define DELTA_TOWER3_Y DELTA_RADIUS
この部分を修正します。
その前に、どのように修正するかを考えます。
DELTA_TOWER1はX軸、DELTA_TOWER2はY軸、DELTA_TOWER3はZ軸を意味します。
私の場合はY軸が傾いてるので、SIN_60、COS_60と書いてあるところを
変更する必要があるわけです。
SIN_60、COS_60とは定数です。
数学の教科書の末尾に表になっていたのを覚えてますか?あれの値のことなんですよ。
同じConfiguration.hの中にそれを定義しているところがあります。
#define SIN_60 0.8660254037844386
#define COS_60 0.5
この部分がそうです。ここに60度以外の値を追加します。
今後のことも考え、周辺の角度も多めに追加しておきます。
#define SIN_58 0.8480480961564259
#define COS_58 0.5299192642332049
#define SIN_59 0.8571673007021122
#define COS_59 0.5150380749100542
#define SIN_59_5 0.8616291604415257
#define COS_59_5 0.5075383629607041
#define SIN_60 0.8660254037844386
#define COS_60 0.5
#define SIN_60_5 0.8703556959398996
#define COS_60_5 0.4924235601034671
#define SIN_61 0.8746197071393958
#define COS_61 0.4848096202463370
#define SIN_62 0.8829475928589269
#define COS_62 0.4694715627858907
ちょっと多すぎたかな?(笑)
でも、これだけ角度の設定があれば困らないでしょ?(笑)
STLを作成した方の説明を読むと、
180° - 軸の角度 = 修正角度
で導くらしい。180°というのはZ軸からの角度を意味しているらしい。
昔勉強した気がしたけど、脳が固くなって働かないので、素直にそのまま信じます。
つまりは、180 - 120.5 = 59.5
なので、私が用意した定数 SIN_59_5、COS_59_5を使います。
#define DELTA_TOWER1_X -SIN_60*DELTA_RADIUS
#define DELTA_TOWER1_Y -COS_60*DELTA_RADIUS
#define DELTA_TOWER2_X SIN_59_5*DELTA_RADIUS
#define DELTA_TOWER2_Y -COS_59_5*DELTA_RADIUS
#define DELTA_TOWER3_X 0.0
#define DELTA_TOWER3_Y DELTA_RADIUS
こんな感じかな。
ファームを焼いてテスト印刷。
角度が合っていれば次の工程に行きます。
私の場合は何故か一致せず、
59.5では求める120°から逆に離れていき121°になってしまいました。
ならば設定する値を逆の60.5にして印刷してみると、
なぜか角度が合致。
私の英語翻訳が間違っているのでしょうかね?ちょっと不安になります。
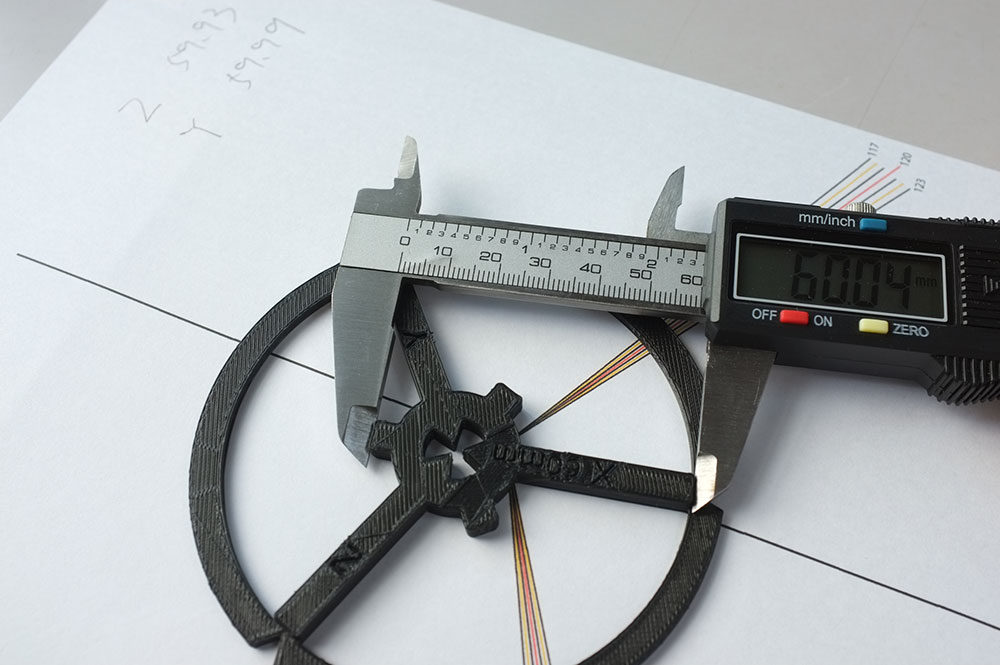
角度があったところで長さをチェックします。



X方向の長さ 59.66mm
Y方向の長さ 59.87mm
Z方向の長さ 60.34mm
60mmが設計上の値です。結構誤差ありますね。
寸法が狂うのはロッドの長さが狂っているというのが定番ですが、事はそう簡単ではありません。
ロッド長の精度に自信がある上に、ロッドごとエフェクターを回転させてテストさせたときに
全く同じ歪みを確認したこと。さらに、ロッドも前とはちがって交換した物です。
ロッド長に問題があったとしたら、全てが同じ結果になるわけがありません。
結局はキャリッジが原因ということです。まぁ、予想はついてましたけどね。
(現在、金属成形のキャリッジを注文中です。)
具体的に言いますと、3つのキャリッジの厚みがそれぞれ違う。
というか正確な四角を保って無く、歪んでいる。
3Dプリントで作られたパーツなので仕方ないのですが・・・・
(これから買う方は押出成形を最低条件にした方がいいでしょうね)
特にX軸のロッドを固定する左右の穴が目視レベルで傾いている。
この問題はX,Y,Z軸に接続されているロッドの長さにも影響を与え、
X軸に至っては、最悪なことに2本繋がっているロッドの片方だけ
極端にズレていると想像できます。
これはキャリッジの交換以外には完全に直しきれないなと諦めつつも、
ロッド長が狂っていたと仮定して処置を一応してみます。
ロッドは、X、Y、Z、それぞれ2本ずつ、計6本ありますが、
それらがすべて同じ長さであることが大前提となっています。
その為Marlinはロッド長をX,Y,Z軸、個別に設定できるようにはなっていないので、
ここを改造する必要があります。
まず、marlinのConfigration.hの
#define DELTA_DIAGONAL_ROD 217.3
を探します。217.3っていうのは現在定義されてるロッド長です。
そして、以下のように3行追加します。
#define DELTA_DIAGONAL_ROD 217.3 //元のロッド長
#define DELTA_DIAGONAL_ROD_X 217.3
#define DELTA_DIAGONAL_ROD_Y 217.3
#define DELTA_DIAGONAL_ROD_Z 217.3
元のロッド長の行全部をコメントアウトしてもしなくてもどちらでも構いません。
次に、Marlin_main.cppの中の
delta[X_AXIS] = sqrt(DELTA_DIAGONAL_ROD_2
- sq(DELTA_TOWER1_X-cartesian[X_AXIS])
- sq(DELTA_TOWER1_Y-cartesian[Y_AXIS])
) + cartesian[Z_AXIS];
delta[Y_AXIS] = sqrt(DELTA_DIAGONAL_ROD_2
- sq(DELTA_TOWER2_X-cartesian[X_AXIS])
- sq(DELTA_TOWER2_Y-cartesian[Y_AXIS])
) + cartesian[Z_AXIS];
delta[Z_AXIS] = sqrt(DELTA_DIAGONAL_ROD_2
- sq(DELTA_TOWER3_X-cartesian[X_AXIS])
- sq(DELTA_TOWER3_Y-cartesian[Y_AXIS])
) + cartesian[Z_AXIS];
この記述を探します。
結構後半ですので、検索機能を利用したほうがいいですね。
見つけたら以下のように変更します。
古い記述は消すのではなく、バグったときに戻しやすくするために
コメントアウトしておくといいですね。
delta[X_AXIS] = sqrt(DELTA_DIAGONAL_ROD_X2
- sq(DELTA_TOWER1_X-cartesian[X_AXIS])
- sq(DELTA_TOWER1_Y-cartesian[Y_AXIS])
) + cartesian[Z_AXIS];
delta[Y_AXIS] = sqrt(DELTA_DIAGONAL_ROD_Y2
- sq(DELTA_TOWER2_X-cartesian[X_AXIS])
- sq(DELTA_TOWER2_Y-cartesian[Y_AXIS])
) + cartesian[Z_AXIS];
delta[Z_AXIS] = sqrt(DELTA_DIAGONAL_ROD_Z2
- sq(DELTA_TOWER3_X-cartesian[X_AXIS])
- sq(DELTA_TOWER3_Y-cartesian[Y_AXIS])
) + cartesian[Z_AXIS];
これで軸ごとに長さを設定することができます。
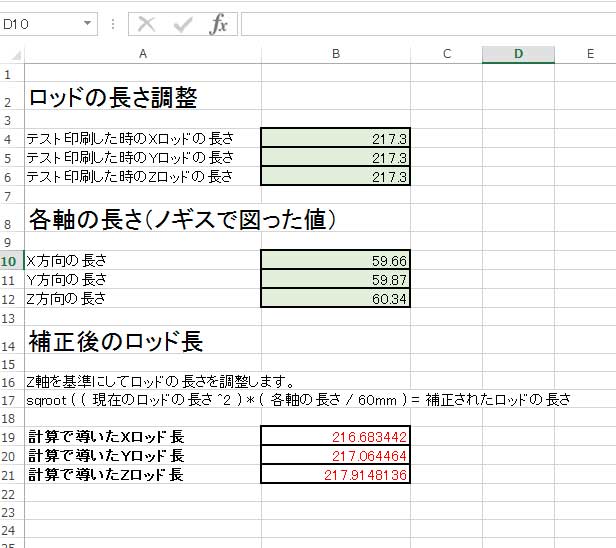
さて、それぞれのロッド長がそれぞれどれくらい狂っているか
調べる必要があります。
それは、Excelに式をいれて値を導きましょう。

rod_adjustment.xlsx
雑に作ったので見た目は不細工ですが、結果がでればいいので十分です。
ここで導いた値をさっきの用意した定数に入れ込みます。
私は少数第4位まで設定しました。
#define DELTA_DIAGONAL_ROD_X 216.6834
#define DELTA_DIAGONAL_ROD_Y 217.0645
#define DELTA_DIAGONAL_ROD_Z 217.9148
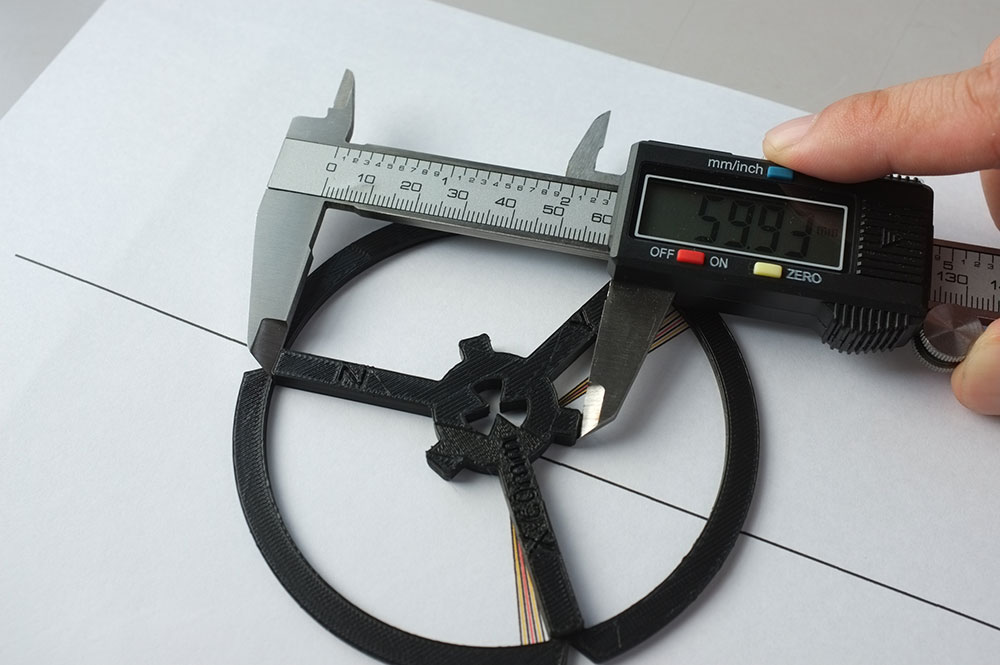
これでファームウェアを焼き付けて、同じようにテスト印刷。



Z軸の長さ 59.93mm
X軸の長さ 60.04mm
Y軸の長さ 59.99mm
かなり補正されましたね。
最後にhttp://www.thingiverse.com/thing:13441
XYZ-Circle_Cal_-_90mm.stl
これを印刷してみます。
結果の写真を取り忘れてしまいましたが、
完全に隙間を取り切ることは出来ず。
しかし、目視で隙間を0.2mmほどまで詰めることが出来ました。
あと一息です。
今できるハード的調整はやりつくしました。
疑わしいところはまだありますが、
これ以上はキャリッジやエフェクターの交換になりますので、
部品調達を行ってますが、それまで間が開きますので
一度区切りをつけます。
ということでテスト印刷をしたくなってきました。
どれくらい精度が上がっているのか気になりますよネ
調整用にいろいろ変更してますからね、
元に戻すのもちょっと面倒ですよ。
ノズルに交換して、さて動作確認。
って、アレアレアレ? ( ˘•ω•˘ ).。oஇ
液晶に「MINTEMP ERROR」
が出て先に進まない・・・・・。
また故障かよぉーーー
ヒートブロックを巻いてたカプトンテープを剥し、
綺麗に束ねていた配線とチューブをほどく・・
そして、サーミスタを交換。
正常に動作を確認。
そしてまた綺麗に纏める。メンドクサイ・・・
サーミスタが壊れやすいとは聞いていましたが、
まさか本当に壊れるとは思ってもいませんでした。
予備のサーミスタを買っておいてよかったよ
こまったときの予備はやはり必要だね!・・( ・ㅂ・)و ̑̑ グッ !
これで印刷できるわー。
では90mmX90mmの評価用モデルを印刷してみます。
http://www.thingiverse.com/thing:13441
XYZ-Circle_Cal_-_90mm.stl
印刷を実行!・・・・・・・ ん? ( ˘•ω•˘ ).。oஇ
ん?吐出されるフィラメントの量が異様に少ない
またもやトラブル発生です。オオスギダヨ!
ノズル詰まってるのかな?と疑ってみましたが、
原因はすぐ判明、モータードライバをA4988からDRV8825にしたことで
エクストルーダーのステップ量が変わってしまっていたこと。
XYZ_MICROSTEPSを32にするだけで
エクストルーダーも大丈夫だべ?とタカをくくっていたら
MarlinのConfiguration.hに
DEFAULT_AXIS_STEPS_PER_UNIT {XYZ_STEPS, XYZ_STEPS, XYZ_STEPS, 150}
って書いてあることに気が付きます。エクストルーダーだけ数字が直書きじゃないですかー orz
XYZ_STEPって本当に軸だけの設定だったのね・・・
150を倍の300にして直接修正っと。これで解決。
気を取り直して再印刷です。
吐出量も安定して印刷が始まりました・・・が、またもやトラブル発生。 ( ˘•ω•˘ ).。oஇ
途中でエクストルーダーが止まったり動いたり不安定だ。
このような症状は、ドライバーの熱暴走ですなぁ・・・。
電圧の調整を行って・・
今は0.4Vまで下げてます。
はぁ、もう大丈夫だろう。
挫けず印刷っと。
そのときの動画はこちら(長いので最初だけ)
おおお、なんか精密感が増してる気がする。
印刷終了後、前に出力したものと比べてみます。
どちらも0.2mm積層でCuraEngineでスライスしました。
設定はデフォルトのまま。特に弄ってません。
左が古い物、右が今回印刷した物
明らかにきれいに印刷されてますね。
角もキレイにまとまってますし、反ってもいません。
塗りつぶしの処理も粗がなく見事に整列していますね。
ついでにタワー部分も拡大してます。
前作のタワーは、積層がはっきりしていて、まさにシマシマ。
調整後のは、同じ0.2mm積層にもかかわらず、
正確に積みあがっている感がしっかりしています。
ロッドの遊びが少なく、求める座標へ的確に動いているのがこれでよくわかりますね。
所々にブツブツができてますが、これはスライサーの調整でなんとかなるでしょう。
造形物の美しさは十分満足いくところまで来ました。
あとは、設計通りの再現性ですが、これは組み立て直後に行った、
角度チェックをもう一度やってみましょう。
スキマあるやん! ガッカリダヨ! (´・ω・`)ショボーン
きっちり90度になり切れてない・・・
およそ0.5mmほどかな。
あれだけ、ハード周りを弄ったのに、結局最初の問題は解決できてないのか・・・ orz
だが、メゲナイよ!
最終手段のソフト調整で何とかするさね。
数学的なことは苦手なのであまり手を出したくなかったのですが、
そうも言ってられなくなってきました。
デルタ系のプリンターで高精度目指すのなら、三角形の寸法を測る必要があります。
そこで先人が作ったSTLを利用してデータを取得してみたいと思います。
それがこちら。
http://www.thingiverse.com/thing:745523
早速印刷してみます。
STLの作者が同梱している角度チェッカーが少々見にくいので、
そこだけ自分で作りました。
http://randol-news.net/download/checker.pdf
で、照らし合わせてみたのがコレ

写真でみると正確に出ているようにも見えますが、
肉眼でじっくり見ると、Y軸の角度が120.5に、
つまり0.5度ほど傾いているように見えます。
こちらをソフト的に修正してみましょう。
MarlinのConfiguration.hを開いて、
#define DELTA_TOWER1_X -SIN_60*DELTA_RADIUS
#define DELTA_TOWER1_Y -COS_60*DELTA_RADIUS
#define DELTA_TOWER2_X SIN_60*DELTA_RADIUS
#define DELTA_TOWER2_Y -COS_60*DELTA_RADIUS
#define DELTA_TOWER3_X 0.0
#define DELTA_TOWER3_Y DELTA_RADIUS
この部分を修正します。
その前に、どのように修正するかを考えます。
DELTA_TOWER1はX軸、DELTA_TOWER2はY軸、DELTA_TOWER3はZ軸を意味します。
私の場合はY軸が傾いてるので、SIN_60、COS_60と書いてあるところを
変更する必要があるわけです。
SIN_60、COS_60とは定数です。
数学の教科書の末尾に表になっていたのを覚えてますか?あれの値のことなんですよ。
同じConfiguration.hの中にそれを定義しているところがあります。
#define SIN_60 0.8660254037844386
#define COS_60 0.5
この部分がそうです。ここに60度以外の値を追加します。
今後のことも考え、周辺の角度も多めに追加しておきます。
#define SIN_58 0.8480480961564259
#define COS_58 0.5299192642332049
#define SIN_59 0.8571673007021122
#define COS_59 0.5150380749100542
#define SIN_59_5 0.8616291604415257
#define COS_59_5 0.5075383629607041
#define SIN_60 0.8660254037844386
#define COS_60 0.5
#define SIN_60_5 0.8703556959398996
#define COS_60_5 0.4924235601034671
#define SIN_61 0.8746197071393958
#define COS_61 0.4848096202463370
#define SIN_62 0.8829475928589269
#define COS_62 0.4694715627858907
ちょっと多すぎたかな?(笑)
でも、これだけ角度の設定があれば困らないでしょ?(笑)
STLを作成した方の説明を読むと、
180° - 軸の角度 = 修正角度
で導くらしい。180°というのはZ軸からの角度を意味しているらしい。
昔勉強した気がしたけど、脳が固くなって働かないので、素直にそのまま信じます。
つまりは、180 - 120.5 = 59.5
なので、私が用意した定数 SIN_59_5、COS_59_5を使います。
#define DELTA_TOWER1_X -SIN_60*DELTA_RADIUS
#define DELTA_TOWER1_Y -COS_60*DELTA_RADIUS
#define DELTA_TOWER2_X SIN_59_5*DELTA_RADIUS
#define DELTA_TOWER2_Y -COS_59_5*DELTA_RADIUS
#define DELTA_TOWER3_X 0.0
#define DELTA_TOWER3_Y DELTA_RADIUS
こんな感じかな。
ファームを焼いてテスト印刷。
角度が合っていれば次の工程に行きます。
私の場合は何故か一致せず、
59.5では求める120°から逆に離れていき121°になってしまいました。
ならば設定する値を逆の60.5にして印刷してみると、
なぜか角度が合致。
私の英語翻訳が間違っているのでしょうかね?ちょっと不安になります。
角度があったところで長さをチェックします。



X方向の長さ 59.66mm
Y方向の長さ 59.87mm
Z方向の長さ 60.34mm
60mmが設計上の値です。結構誤差ありますね。
寸法が狂うのはロッドの長さが狂っているというのが定番ですが、事はそう簡単ではありません。
ロッド長の精度に自信がある上に、ロッドごとエフェクターを回転させてテストさせたときに
全く同じ歪みを確認したこと。さらに、ロッドも前とはちがって交換した物です。
ロッド長に問題があったとしたら、全てが同じ結果になるわけがありません。
結局はキャリッジが原因ということです。まぁ、予想はついてましたけどね。
(現在、金属成形のキャリッジを注文中です。)
具体的に言いますと、3つのキャリッジの厚みがそれぞれ違う。
というか正確な四角を保って無く、歪んでいる。
3Dプリントで作られたパーツなので仕方ないのですが・・・・
(これから買う方は押出成形を最低条件にした方がいいでしょうね)
特にX軸のロッドを固定する左右の穴が目視レベルで傾いている。
この問題はX,Y,Z軸に接続されているロッドの長さにも影響を与え、
X軸に至っては、最悪なことに2本繋がっているロッドの片方だけ
極端にズレていると想像できます。
これはキャリッジの交換以外には完全に直しきれないなと諦めつつも、
ロッド長が狂っていたと仮定して処置を一応してみます。
ロッドは、X、Y、Z、それぞれ2本ずつ、計6本ありますが、
それらがすべて同じ長さであることが大前提となっています。
その為Marlinはロッド長をX,Y,Z軸、個別に設定できるようにはなっていないので、
ここを改造する必要があります。
まず、marlinのConfigration.hの
#define DELTA_DIAGONAL_ROD 217.3
を探します。217.3っていうのは現在定義されてるロッド長です。
そして、以下のように3行追加します。
#define DELTA_DIAGONAL_ROD 217.3 //元のロッド長
#define DELTA_DIAGONAL_ROD_X 217.3
#define DELTA_DIAGONAL_ROD_Y 217.3
#define DELTA_DIAGONAL_ROD_Z 217.3
元のロッド長の行全部をコメントアウトしてもしなくてもどちらでも構いません。
次に、Marlin_main.cppの中の
delta[X_AXIS] = sqrt(DELTA_DIAGONAL_ROD_2
- sq(DELTA_TOWER1_X-cartesian[X_AXIS])
- sq(DELTA_TOWER1_Y-cartesian[Y_AXIS])
) + cartesian[Z_AXIS];
delta[Y_AXIS] = sqrt(DELTA_DIAGONAL_ROD_2
- sq(DELTA_TOWER2_X-cartesian[X_AXIS])
- sq(DELTA_TOWER2_Y-cartesian[Y_AXIS])
) + cartesian[Z_AXIS];
delta[Z_AXIS] = sqrt(DELTA_DIAGONAL_ROD_2
- sq(DELTA_TOWER3_X-cartesian[X_AXIS])
- sq(DELTA_TOWER3_Y-cartesian[Y_AXIS])
) + cartesian[Z_AXIS];
この記述を探します。
結構後半ですので、検索機能を利用したほうがいいですね。
見つけたら以下のように変更します。
古い記述は消すのではなく、バグったときに戻しやすくするために
コメントアウトしておくといいですね。
delta[X_AXIS] = sqrt(DELTA_DIAGONAL_ROD_X2
- sq(DELTA_TOWER1_X-cartesian[X_AXIS])
- sq(DELTA_TOWER1_Y-cartesian[Y_AXIS])
) + cartesian[Z_AXIS];
delta[Y_AXIS] = sqrt(DELTA_DIAGONAL_ROD_Y2
- sq(DELTA_TOWER2_X-cartesian[X_AXIS])
- sq(DELTA_TOWER2_Y-cartesian[Y_AXIS])
) + cartesian[Z_AXIS];
delta[Z_AXIS] = sqrt(DELTA_DIAGONAL_ROD_Z2
- sq(DELTA_TOWER3_X-cartesian[X_AXIS])
- sq(DELTA_TOWER3_Y-cartesian[Y_AXIS])
) + cartesian[Z_AXIS];
これで軸ごとに長さを設定することができます。
さて、それぞれのロッド長がそれぞれどれくらい狂っているか
調べる必要があります。
それは、Excelに式をいれて値を導きましょう。
rod_adjustment.xlsx
雑に作ったので見た目は不細工ですが、結果がでればいいので十分です。
ここで導いた値をさっきの用意した定数に入れ込みます。
私は少数第4位まで設定しました。
#define DELTA_DIAGONAL_ROD_X 216.6834
#define DELTA_DIAGONAL_ROD_Y 217.0645
#define DELTA_DIAGONAL_ROD_Z 217.9148
これでファームウェアを焼き付けて、同じようにテスト印刷。

Z軸の長さ 59.93mm
X軸の長さ 60.04mm
Y軸の長さ 59.99mm
かなり補正されましたね。
最後にhttp://www.thingiverse.com/thing:13441
XYZ-Circle_Cal_-_90mm.stl
これを印刷してみます。
結果の写真を取り忘れてしまいましたが、
完全に隙間を取り切ることは出来ず。
しかし、目視で隙間を0.2mmほどまで詰めることが出来ました。
あと一息です。
UPSのバッテリーが逝った
2016.09.06
先日の停電を最後に、UPSのバッテリーが逝きました。
購入時期をあらためて確認すると、4年も頑張ってくれたのね。

とても安くて誰でも導入しやすいこのUPS、
バッテリーだけを購入して交換しようとすると
純正バッテリーは案外高いのです。
差はおよそ4000円
UPS本体も4年経てばいつ壊れてもおかしくないということで
これって同じものを買い直した方がお得なんじゃない?
って考えるのは誰しも思うこと。
軽くこのRS550(BR550G-JP)を説明しますと、
安いには訳がありまして、正弦波に正式対応してないのです。
http://www.apcmedia.com/salestools/EALN-7L2H33/EALN-7L2H33_R0_JA.pdf?sdirect=true
↑ここでは矩形波って書いてますね。
つまり接続機器によってはちょっと難ありのUPSなんです。
主にNEC製のビジネス用デスクトップパソコンや
NEC製サーバーでは落ちることを自分の目で確認してます。
UPSを本体ごと買い替えても、バッテリーだけ買い替えても、
このまま4年程使うのか?など雑念も頭を過ります。
今使っているPCはこのUPSで問題なく動くので困ることはなかったのですが、
これも4年使ってるしいつ壊れてもおかしくありません。
PCを買い替えるときに正弦波対応のUPSであれば選択肢が広がるなとか
いろいろ考えを巡らして、悩んだ挙句
を買うことにしました。
RS550ほど液晶表示も豊富ではないし、情報を得られるツールも付属してませんが、
製品の安定感は各評価を見る限りとても素晴らしい。
購入して1か月以内にユーザー登録すると、
3年以内にバッテリーが死んだときに交換してくれるサービスもあって、
ユーザーサポートも満足です。
使ってみたところ、RS550と違って端子の接続も最初からしてあり、
コンセントをつないで電源を入れるだけですぐ使えました。
充電もされてあるので、動作検証もすぐできます。
これだと初心者でも簡単に導入できますね。
さて、RS550の再利用も考えます。ネットでいろいろ情報を探してみると、
社外製バッテリーもいろいろあるんですね。
それでも6000円・・・ 高いなぁ・・・
他のメーカーで探してみると、LONGやCLASSIC PRO等があります。
値段を見ると台湾kunglong社のLONGが一番安いようですね。
=================================================
ここから先は自己責任の世界です( ´艸`)
数字データを鵜呑みにして事故を起こしても当方は責任を負えませんで
あらかじめ自分で確証と責任をもって行動できる大人の方だけ参考にしてください。
=================================================
LONG製品のUPS該当リストにRS550(BR550G-JP)はありません。
でもバッテリーなんて、サイズと電圧と、充電方式と、端子の形状が合致すれば
問題なく使えるはずなのです。
純正品のバッテリーサイズが、105x151x65mmなのでこのサイズに合うものを探してみると、
WP1236W(94x151x65mm)で十分いけそうです。
完全互換をうたっている上記のバッテリーストア製バッテリーの仕様を見みると、
サイズがLONG製とほぼ一致。
あれ?これ「バッテリーストア.comオリジナル」って言ってますが、中身LONGじゃないの?
いや、もしかしてサイズは統一規格?
純正の容量は7.2Ahなんですが、Longは9Ah・・ これが本当であれば容量アップ?
気になるのは、LONGバッテリーの最大充電電流:0.3CA(2.55A)というところで、
純正の仕様にこの情報は書かれていないので、一抹の不安が残るのですが、
互換品でよく使われるユアサのバッテリーで例えると、12V7.2AhのPXL12072で、0.25CAの様です。
ということは純正品も0.3CA以下だと予想できます。(確信はない)
ネットではすでに交換されている方がいて、1年以上使っていて問題ないという情報も見られます。
UPSが電流コントロールしてるのかな?と想像してみたり。
(少し膨らんで、本体から取り出せなくなったという話もあるが・・・まぁ使い方次第でしょう。)
LONGを取り扱っているところで最も安く売っているところを探してみると、
北海道までの送料を含めたトータルで
http://akizukidenshi.com/catalog/g/gB-02118/
秋月が一番安く売っているようです。
さっそくポチっとな。
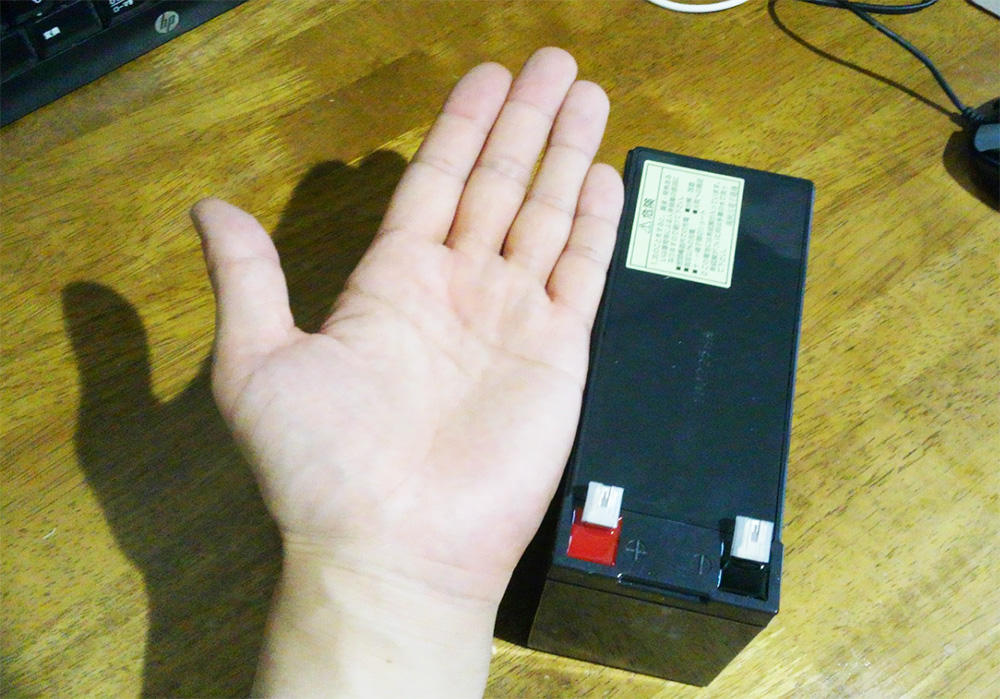
送料込みで¥2,700で買えてしまいましたよ。
で届いたのがコレ。



価格から想像するに、適当な箱に雑に詰められて送ってくるかと思いきや、
型番もしっかり印刷され、本体の大きさに合わせた専用物でした。

思いのほか小さい。鉛蓄電池だと車のバッテリーを想像してしまいますが、
これだけ小さいと可愛いものです。
さて、交換してみましょう。
背面のふたを開けます。ネジがなく、指の力だけで簡単に開きます。


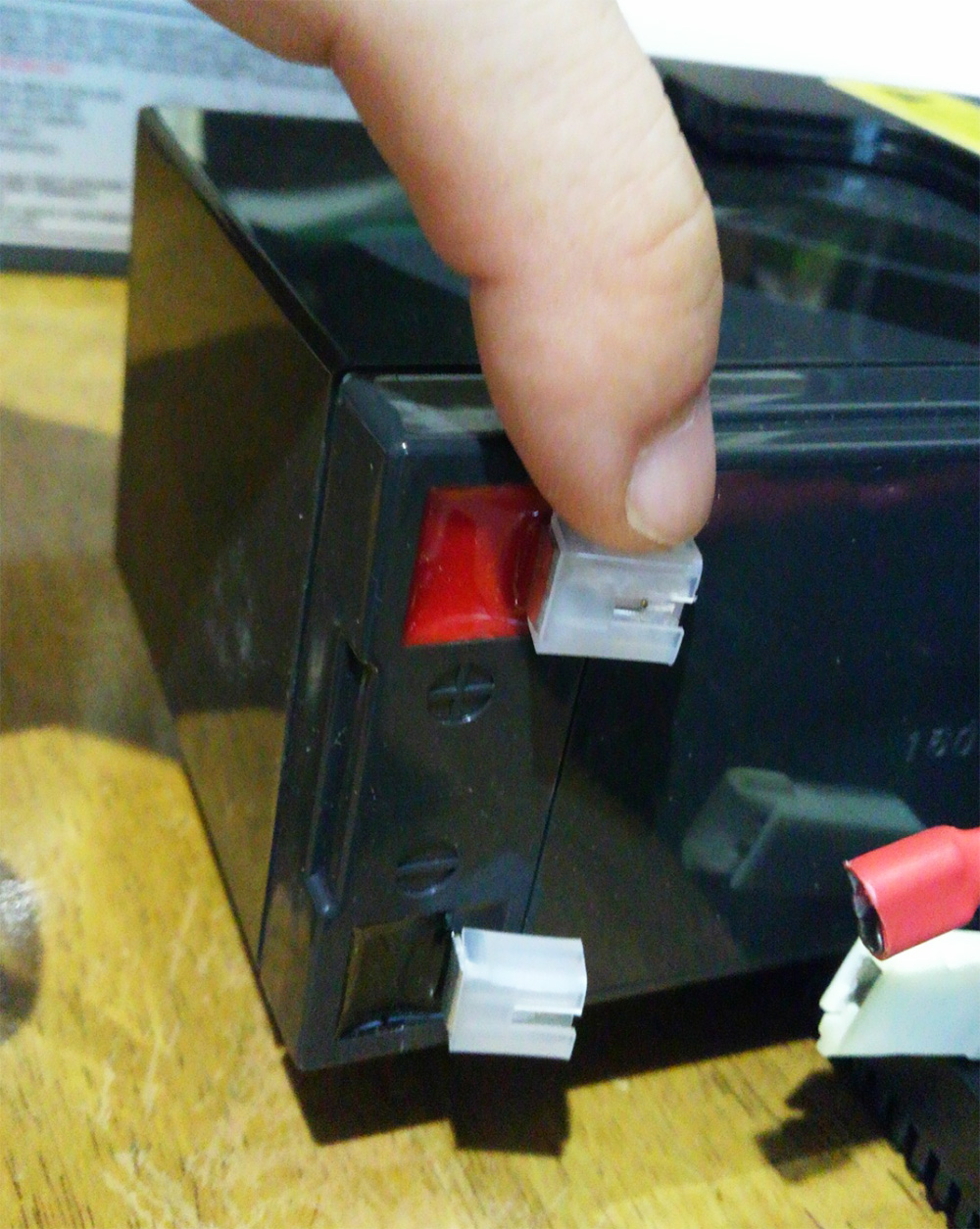
バッテリーを少しだけ引っ張り出します。


プラスとマイナスの端子を外してバッテリーを引き抜きます。

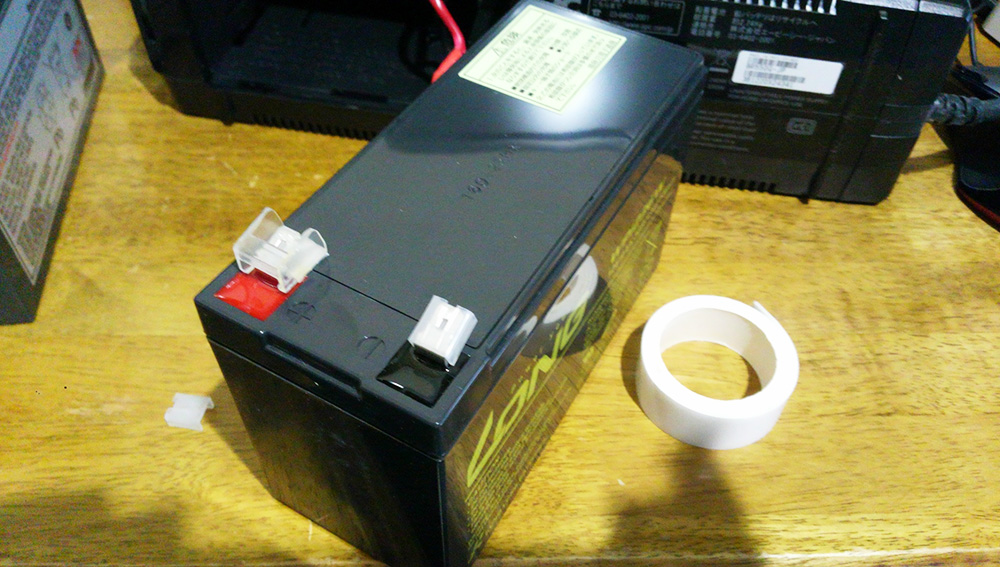
純正とLONGバッテリーを比べてみました。

寸法データ通り、大きさはピッタリです。
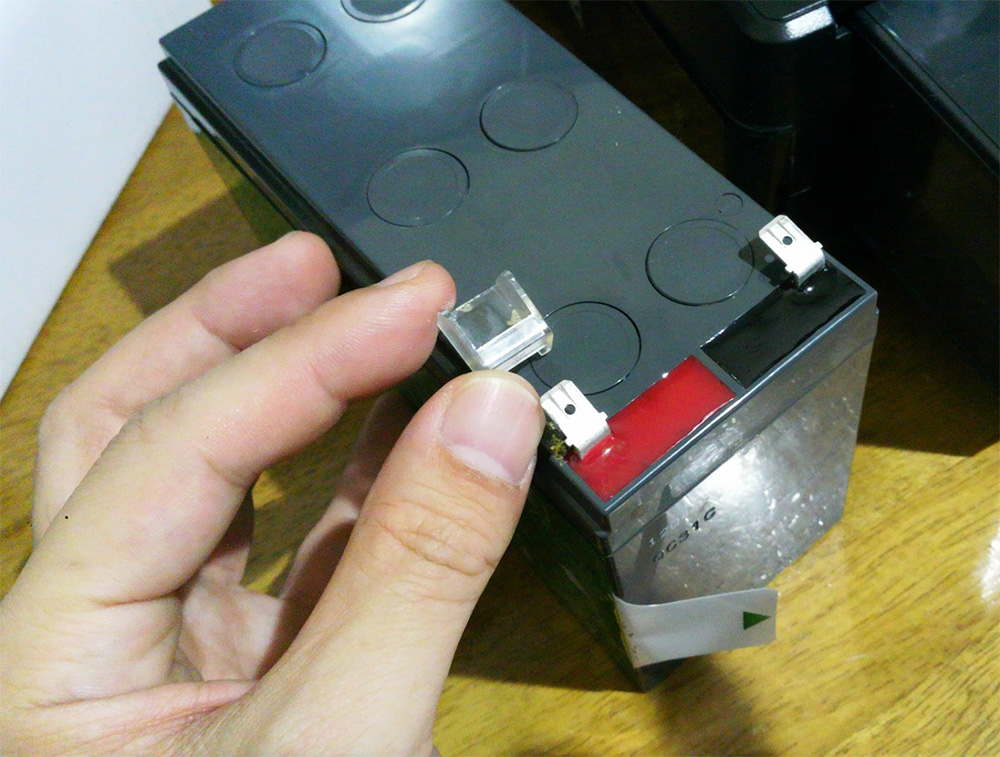
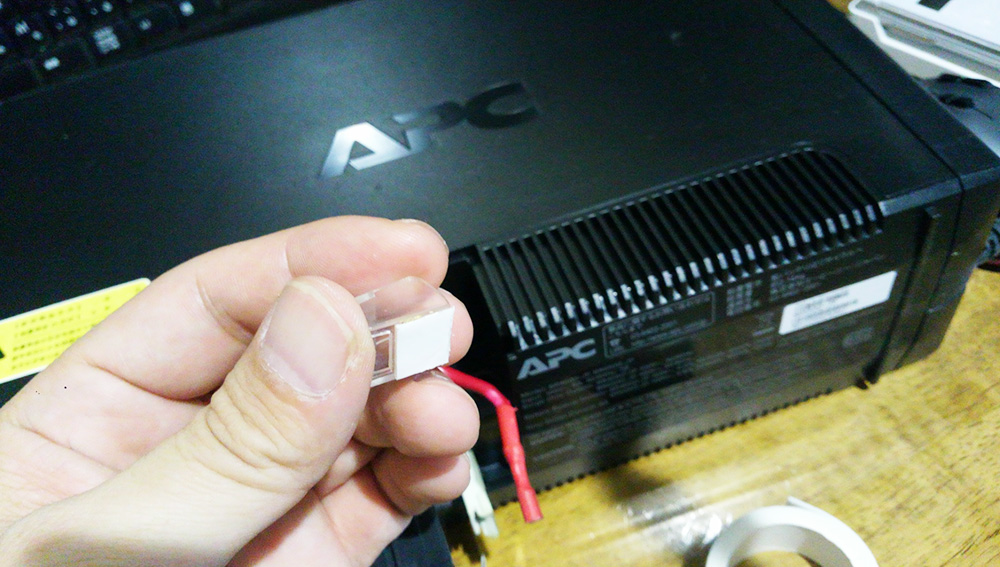
ロングのバッテリーには、端子にカバーが付いているので、外します。

純正バッテリーのプラス端子に両面テープで端子カバーが付いていますが、
こちらは接続してもそのままつけてられるタイプですので、流用します。

古い両面テープはキレイにはがし、新しく張り替えて・・・・


LONGにペッタンコ!
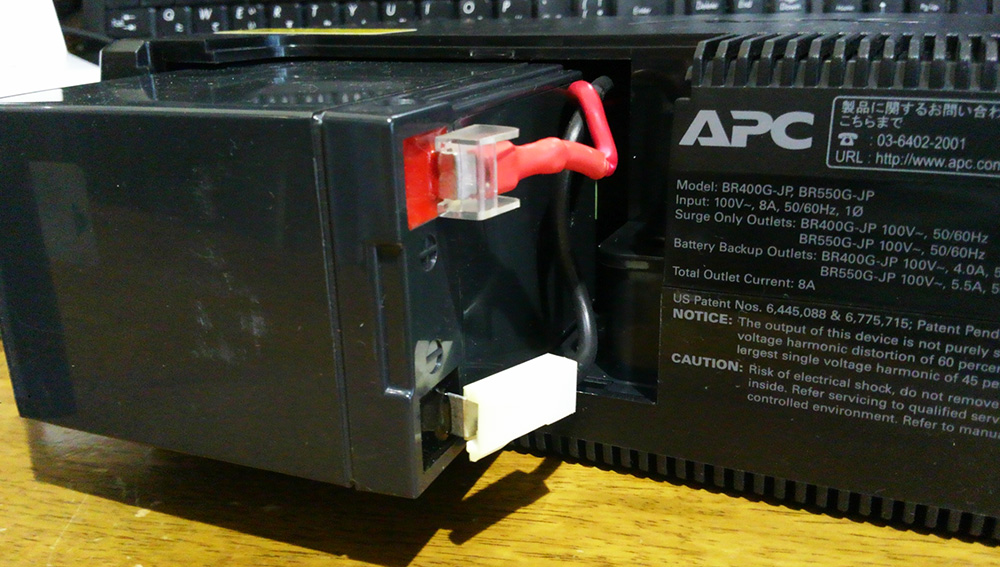
次は、本体に接続。

端子の形状もサイズもピッタリ。
ホント手間かからないですね。
電源ON


警告なく立ち上がりましたよ。
死んだバッテリーで立ち上げた時、バッテリー交換のマークがついて、
けたたましい音が鳴っていたのですが・・・
本体は互換品ともうたわれてないコレを、新品のバッテリとして理解してくれたようです。
液晶を見ると、バッテリ残量はゼロです。車のバッテリーでは充電して売っているのですが、
UPSは違うんですかね?初期充電を行ってないと寿命縮まるんじゃ?
電圧計ってから組み込めばよかったなぁ・・
謎が多いですね、このバッテリー。

↑2時間充電してみました。
問題なく動いてます。
今後はバッテリーの膨らみ具合を数か月に1回確認すれば、問題ないと判断しました。
価格が安いので寿命が早く来ても気軽に替えられますね。
購入時期をあらためて確認すると、4年も頑張ってくれたのね。

とても安くて誰でも導入しやすいこのUPS、
バッテリーだけを購入して交換しようとすると
純正バッテリーは案外高いのです。
差はおよそ4000円
UPS本体も4年経てばいつ壊れてもおかしくないということで
これって同じものを買い直した方がお得なんじゃない?
って考えるのは誰しも思うこと。
軽くこのRS550(BR550G-JP)を説明しますと、
安いには訳がありまして、正弦波に正式対応してないのです。
http://www.apcmedia.com/salestools/EALN-7L2H33/EALN-7L2H33_R0_JA.pdf?sdirect=true
↑ここでは矩形波って書いてますね。
つまり接続機器によってはちょっと難ありのUPSなんです。
主にNEC製のビジネス用デスクトップパソコンや
NEC製サーバーでは落ちることを自分の目で確認してます。
UPSを本体ごと買い替えても、バッテリーだけ買い替えても、
このまま4年程使うのか?など雑念も頭を過ります。
今使っているPCはこのUPSで問題なく動くので困ることはなかったのですが、
これも4年使ってるしいつ壊れてもおかしくありません。
PCを買い替えるときに正弦波対応のUPSであれば選択肢が広がるなとか
いろいろ考えを巡らして、悩んだ挙句
を買うことにしました。
RS550ほど液晶表示も豊富ではないし、情報を得られるツールも付属してませんが、
製品の安定感は各評価を見る限りとても素晴らしい。
購入して1か月以内にユーザー登録すると、
3年以内にバッテリーが死んだときに交換してくれるサービスもあって、
ユーザーサポートも満足です。
使ってみたところ、RS550と違って端子の接続も最初からしてあり、
コンセントをつないで電源を入れるだけですぐ使えました。
充電もされてあるので、動作検証もすぐできます。
これだと初心者でも簡単に導入できますね。
さて、RS550の再利用も考えます。ネットでいろいろ情報を探してみると、
社外製バッテリーもいろいろあるんですね。
それでも6000円・・・ 高いなぁ・・・
他のメーカーで探してみると、LONGやCLASSIC PRO等があります。
値段を見ると台湾kunglong社のLONGが一番安いようですね。
=================================================
ここから先は自己責任の世界です( ´艸`)
数字データを鵜呑みにして事故を起こしても当方は責任を負えませんで
あらかじめ自分で確証と責任をもって行動できる大人の方だけ参考にしてください。
=================================================
LONG製品のUPS該当リストにRS550(BR550G-JP)はありません。
でもバッテリーなんて、サイズと電圧と、充電方式と、端子の形状が合致すれば
問題なく使えるはずなのです。
純正品のバッテリーサイズが、105x151x65mmなのでこのサイズに合うものを探してみると、
WP1236W(94x151x65mm)で十分いけそうです。
完全互換をうたっている上記のバッテリーストア製バッテリーの仕様を見みると、
サイズがLONG製とほぼ一致。
あれ?これ「バッテリーストア.comオリジナル」って言ってますが、中身LONGじゃないの?
いや、もしかしてサイズは統一規格?
純正の容量は7.2Ahなんですが、Longは9Ah・・ これが本当であれば容量アップ?
気になるのは、LONGバッテリーの最大充電電流:0.3CA(2.55A)というところで、
純正の仕様にこの情報は書かれていないので、一抹の不安が残るのですが、
互換品でよく使われるユアサのバッテリーで例えると、12V7.2AhのPXL12072で、0.25CAの様です。
ということは純正品も0.3CA以下だと予想できます。(確信はない)
ネットではすでに交換されている方がいて、1年以上使っていて問題ないという情報も見られます。
UPSが電流コントロールしてるのかな?と想像してみたり。
(少し膨らんで、本体から取り出せなくなったという話もあるが・・・まぁ使い方次第でしょう。)
LONGを取り扱っているところで最も安く売っているところを探してみると、
北海道までの送料を含めたトータルで
http://akizukidenshi.com/catalog/g/gB-02118/
秋月が一番安く売っているようです。
さっそくポチっとな。
送料込みで¥2,700で買えてしまいましたよ。
で届いたのがコレ。



価格から想像するに、適当な箱に雑に詰められて送ってくるかと思いきや、
型番もしっかり印刷され、本体の大きさに合わせた専用物でした。
思いのほか小さい。鉛蓄電池だと車のバッテリーを想像してしまいますが、
これだけ小さいと可愛いものです。
さて、交換してみましょう。
背面のふたを開けます。ネジがなく、指の力だけで簡単に開きます。


バッテリーを少しだけ引っ張り出します。


プラスとマイナスの端子を外してバッテリーを引き抜きます。

純正とLONGバッテリーを比べてみました。

寸法データ通り、大きさはピッタリです。
ロングのバッテリーには、端子にカバーが付いているので、外します。
純正バッテリーのプラス端子に両面テープで端子カバーが付いていますが、
こちらは接続してもそのままつけてられるタイプですので、流用します。
古い両面テープはキレイにはがし、新しく張り替えて・・・・
LONGにペッタンコ!
次は、本体に接続。
端子の形状もサイズもピッタリ。
ホント手間かからないですね。
電源ON

警告なく立ち上がりましたよ。
死んだバッテリーで立ち上げた時、バッテリー交換のマークがついて、
けたたましい音が鳴っていたのですが・・・
本体は互換品ともうたわれてないコレを、新品のバッテリとして理解してくれたようです。
液晶を見ると、バッテリ残量はゼロです。車のバッテリーでは充電して売っているのですが、
UPSは違うんですかね?初期充電を行ってないと寿命縮まるんじゃ?
電圧計ってから組み込めばよかったなぁ・・
謎が多いですね、このバッテリー。

↑2時間充電してみました。
問題なく動いてます。
今後はバッテリーの膨らみ具合を数か月に1回確認すれば、問題ないと判断しました。
価格が安いので寿命が早く来ても気軽に替えられますね。





