Kossel リビルド 配線編
2018.01.24
前のボディフレーム編から、かなり日が経ってしまいました。
部品調達等を行なっていると3週間とか簡単に待たされてしまうので
その影響とご理解ください(;´Д`)
そのかわりボリュームは有りますのでスクロールが長いです。
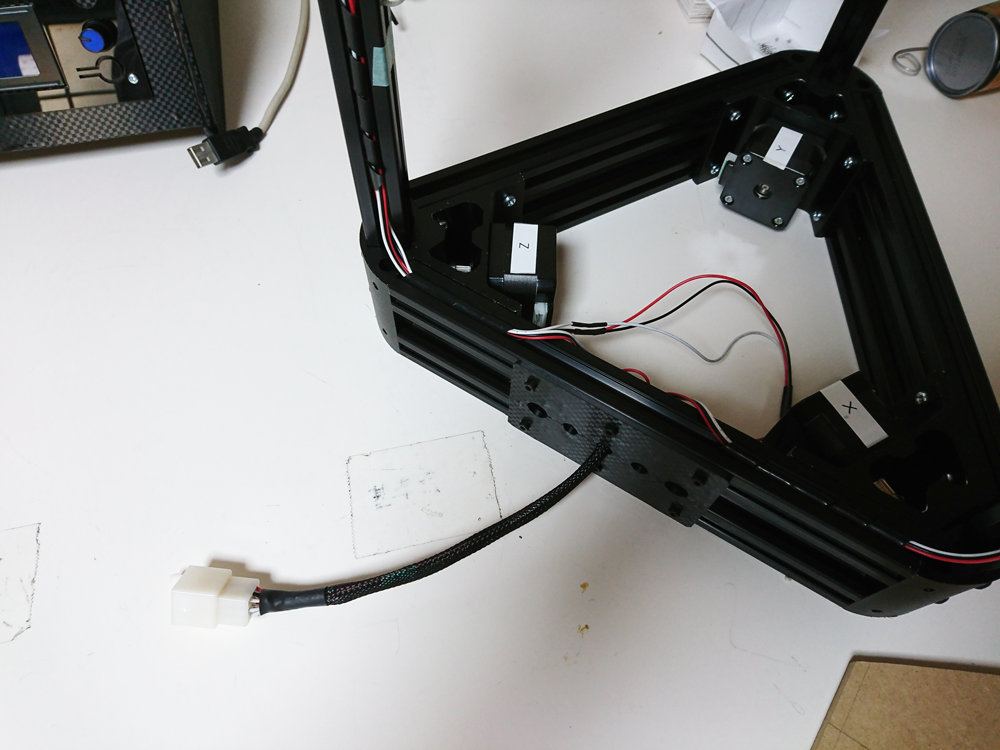
ボディが出来上がったので、次は配線ですが、
まずは動作確認が簡単なエンドストップから始めます。
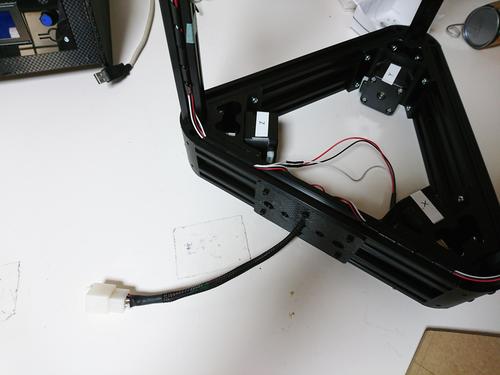
エンドストップは上部に取り付けられるので
下まで配線を通すと長さが結構必要なのです。
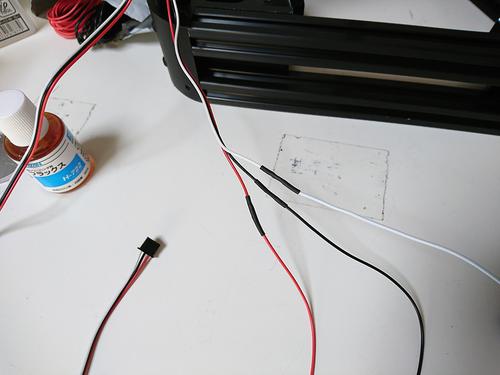
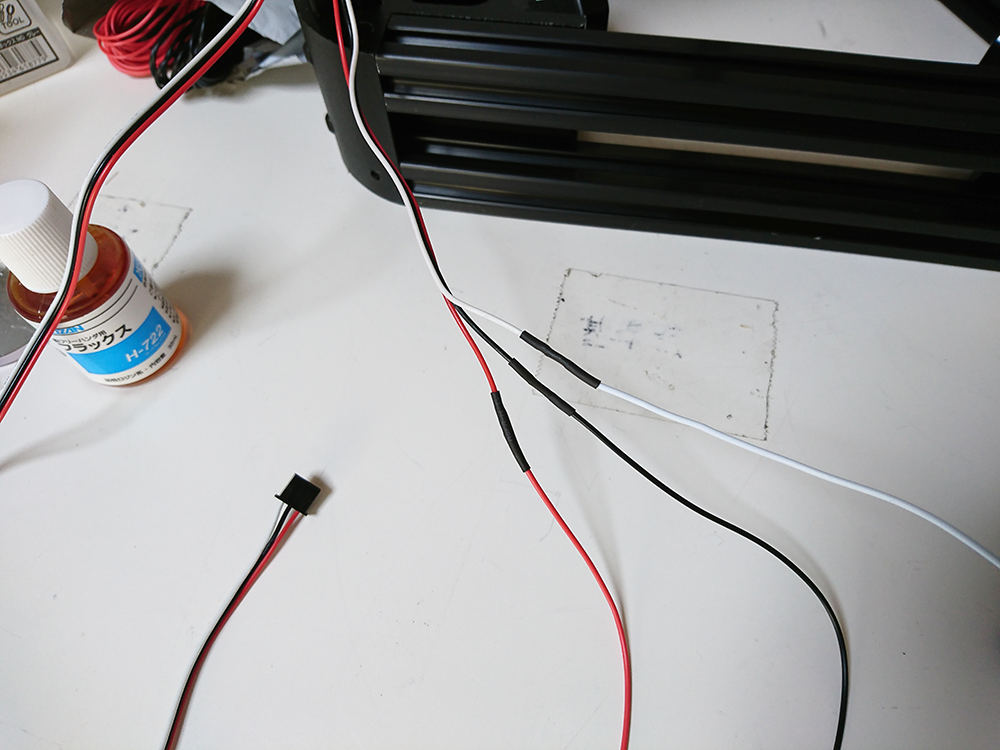
エンドストップの付属配線をそのまま使用すると、
3つあるエンドストップのうち
1つがどうしても長さが足りないので延長いたしました。
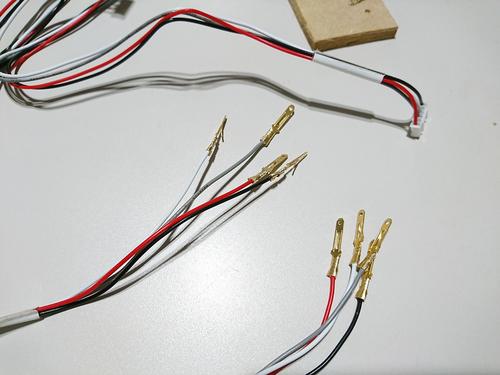
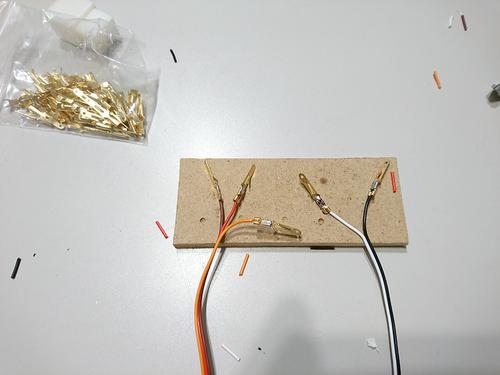
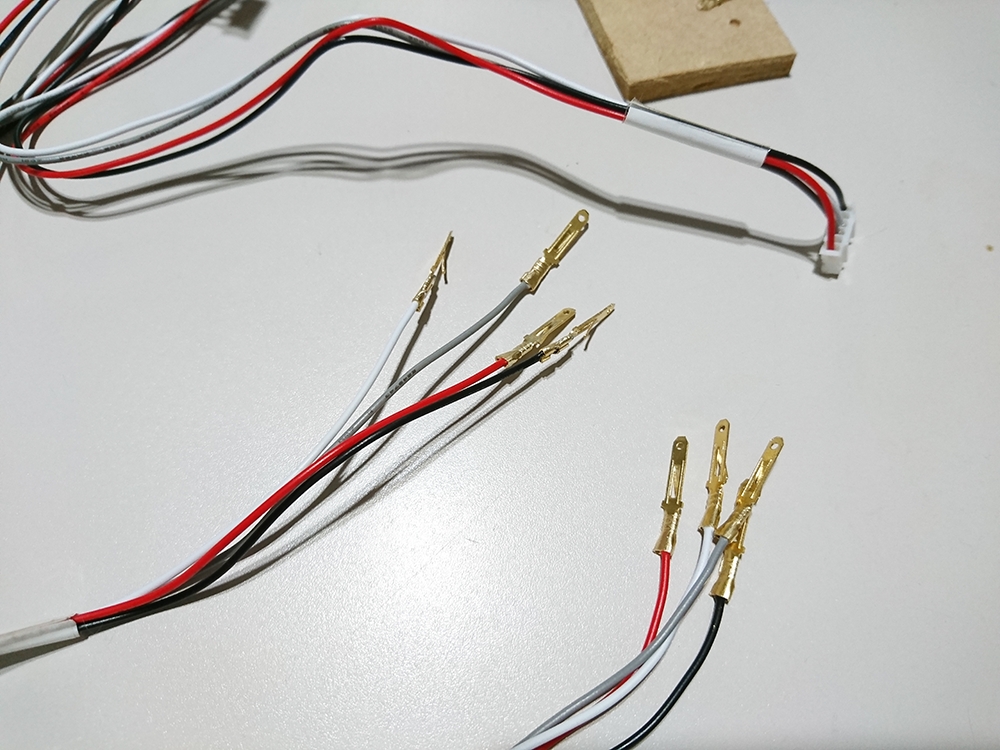
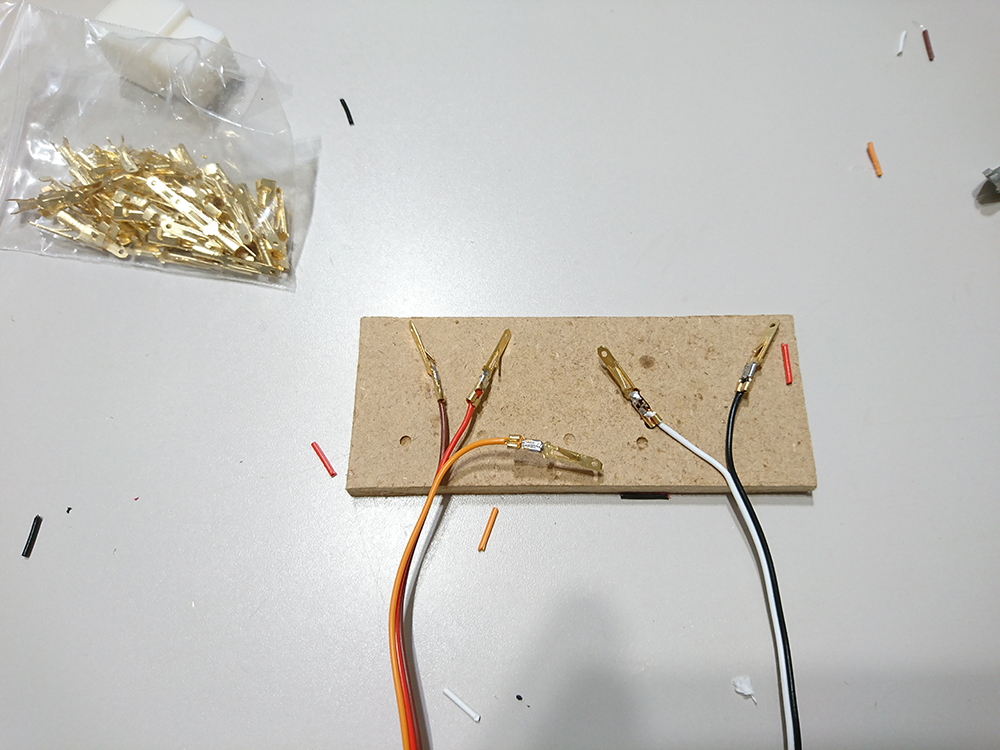
配線の先端をコネクタ金具を圧着。
あとから接触不良などで悩みたくないので、
更にハンダで確実に繋げます。
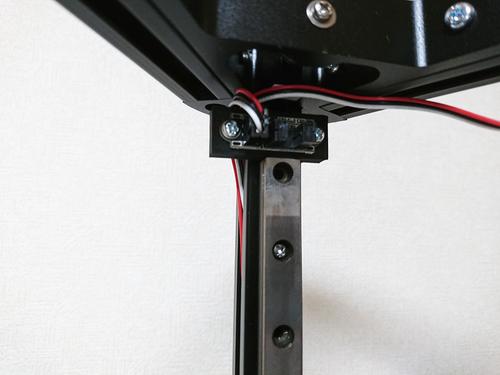
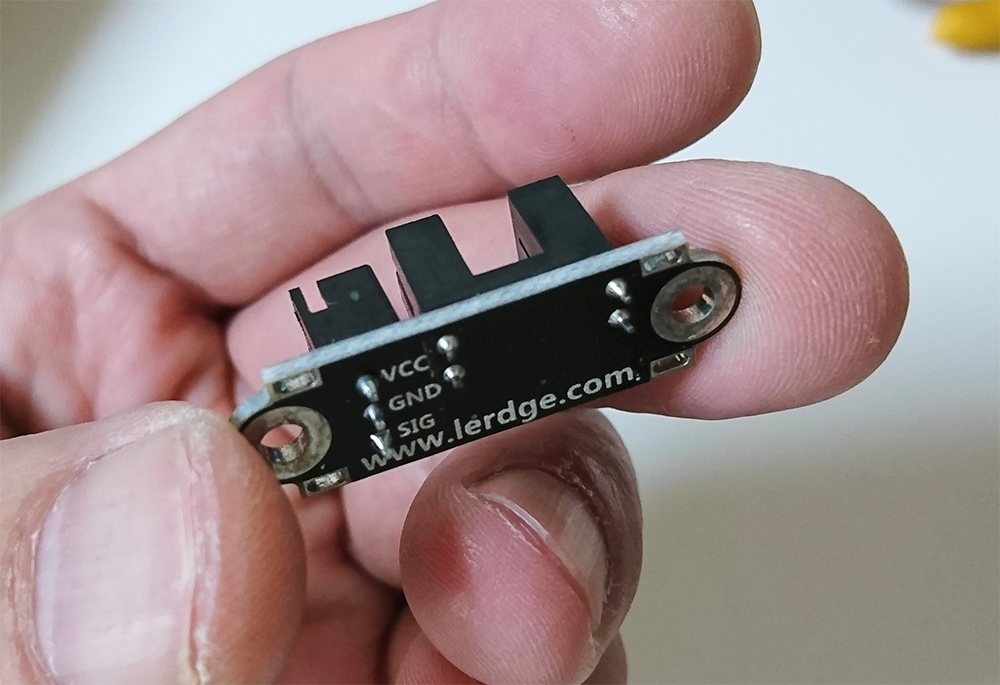
あと注意するべき点は、センサーの接続先を確認することですね。
以前、実験で使用した赤いボディの光学エンドストップと
配線の色や配置が違っております。

赤がシグナル。黒がGND。白がVCC。
間違えないように慎重にカプラへ入れます。
間違えるとArduinoが燃えます(;´Д`)

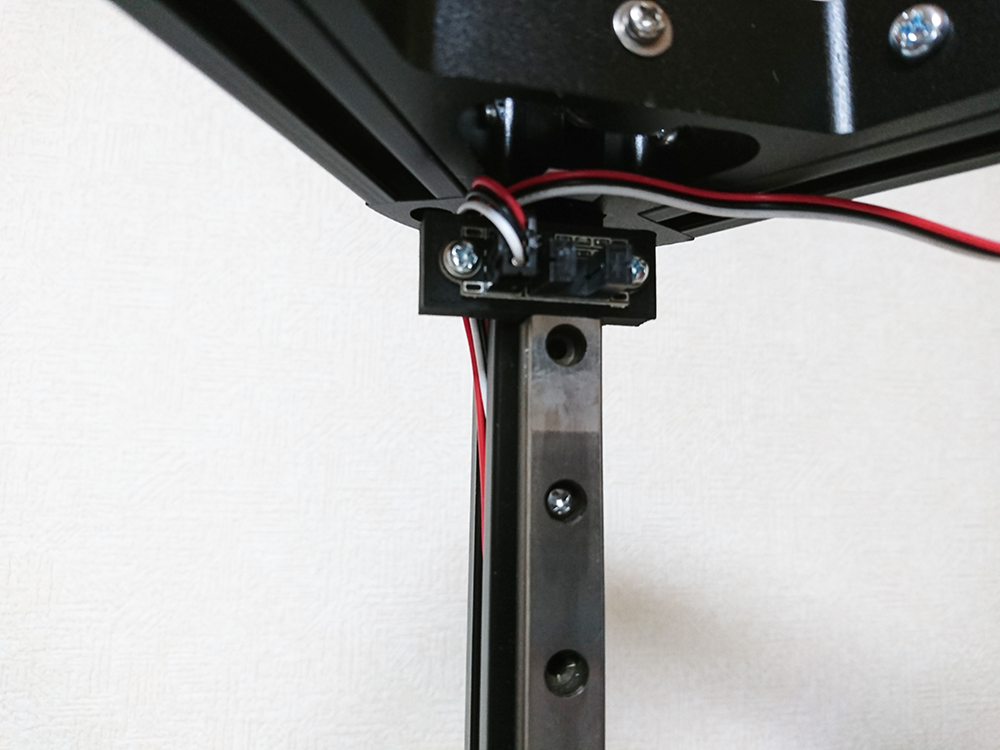
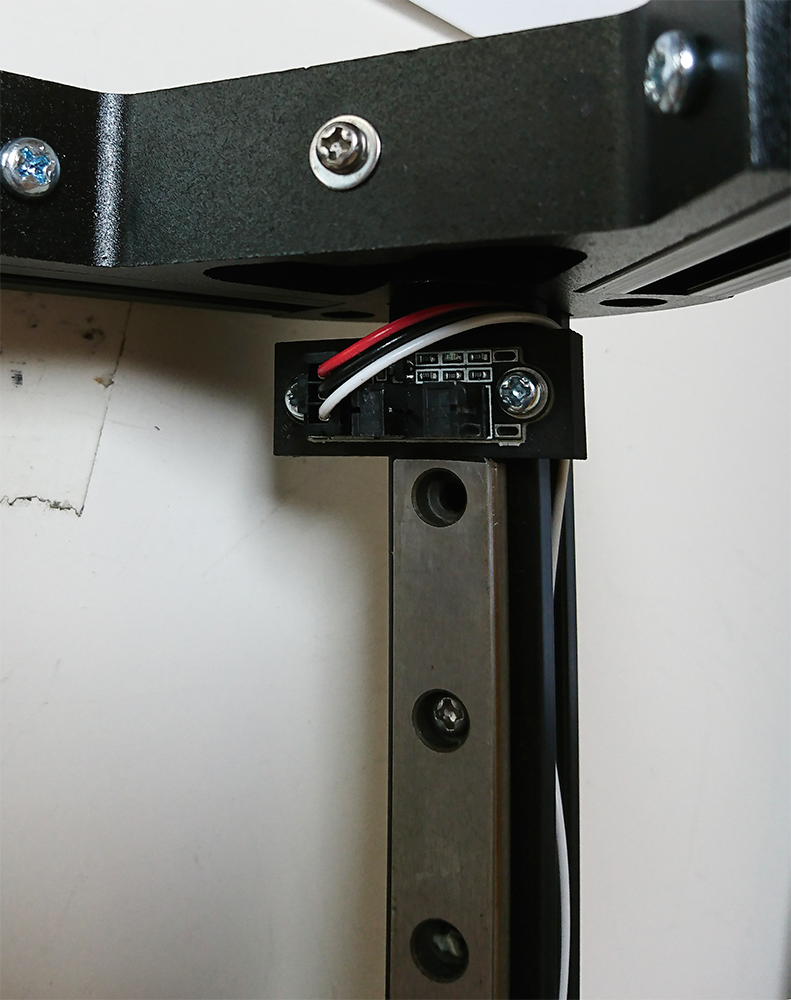
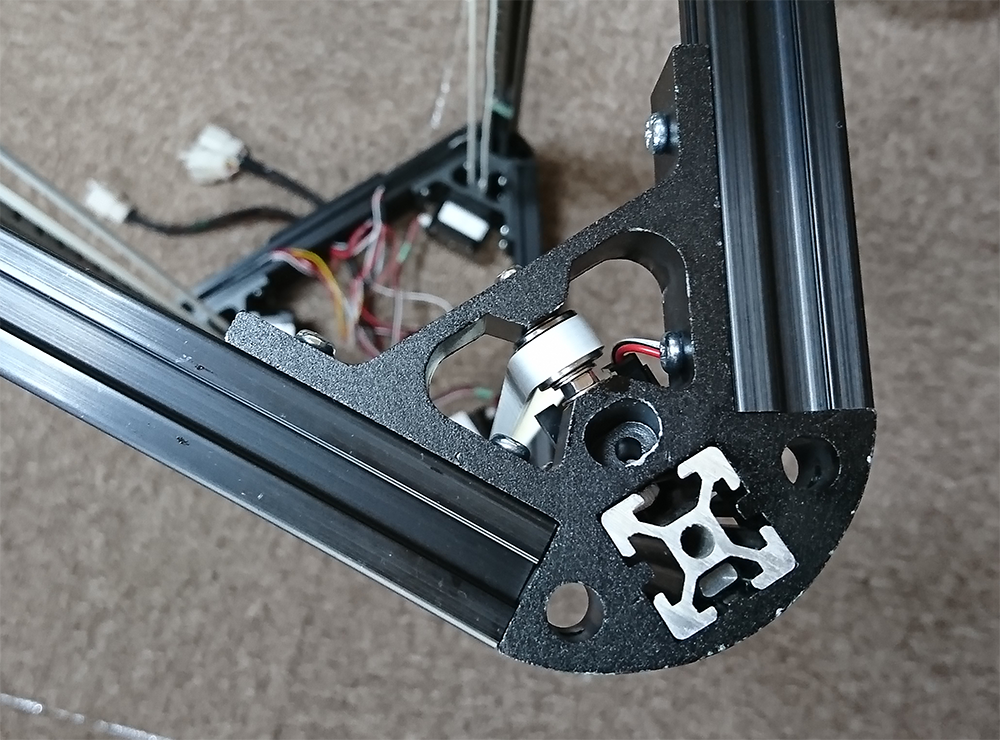
タイミングベルトがセンサーのすぐ前を通るので、
干渉しないように後ろに配線を回してコネクタ接続。
ある程度作業が落ち着いたらタイラップを利用して配線を固定するかな。
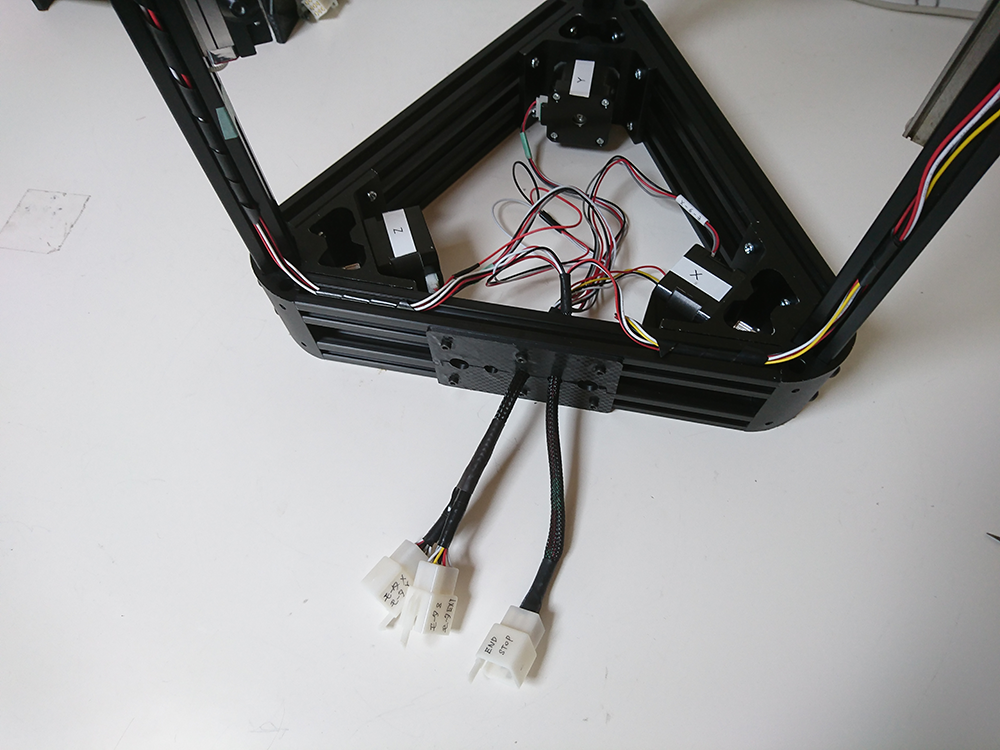
事前に作っておいた、ケーブル固定パネルでサンド。
完成イメージが湧いてきました。
Arduinoを接続してセンサーの動作確認してみました。
ピンを検知してLEDが点灯しますね。
センサーの動作は問題なさそうです。
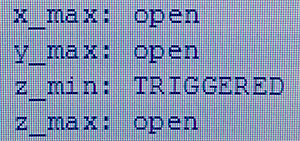
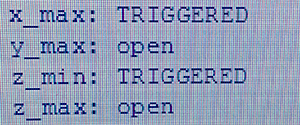
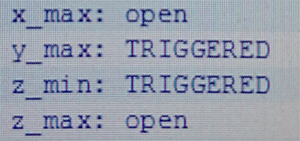
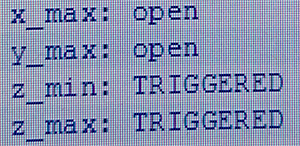
次はM119コマンドを用いてXYZ軸の間違いや極性の確認を行います。
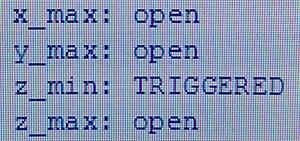
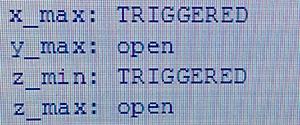
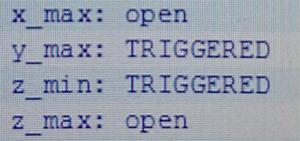
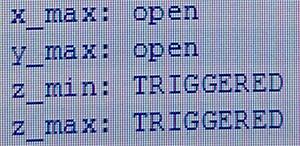
左から、フリー、X軸on、Y軸on、Z軸on
z_minはオートレベリング用のものなので、この場はスルーします。
コマンドの回答を見る限り軸間違いはなさそうです。
極性も当初の予定通り変更なしで済みそうです。
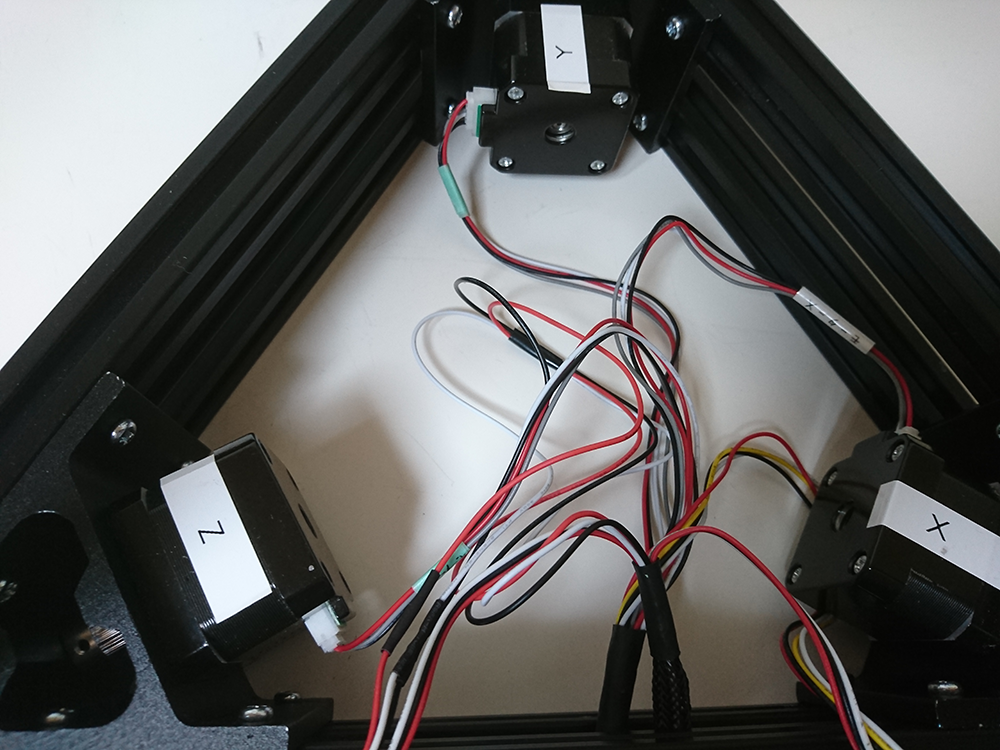
次はモーターの配線。
エンドストップと同じようにピンを圧着。はんだ付き。
注意点は配線を16本使うので、使うカプラは2個。
接続するカプラを間違えないようにマーキングするくらいかな。
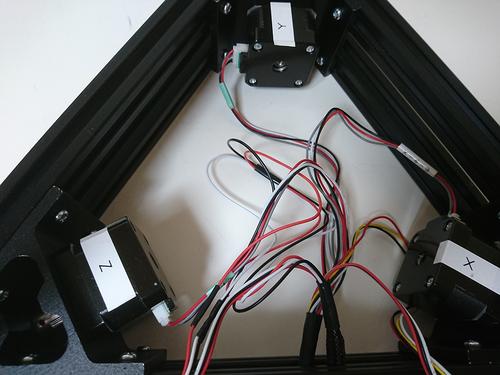
モーターに接続。
配線が多くなってきたけど、前に比べたら全然スカスカ。
束ねればスッキリするね。
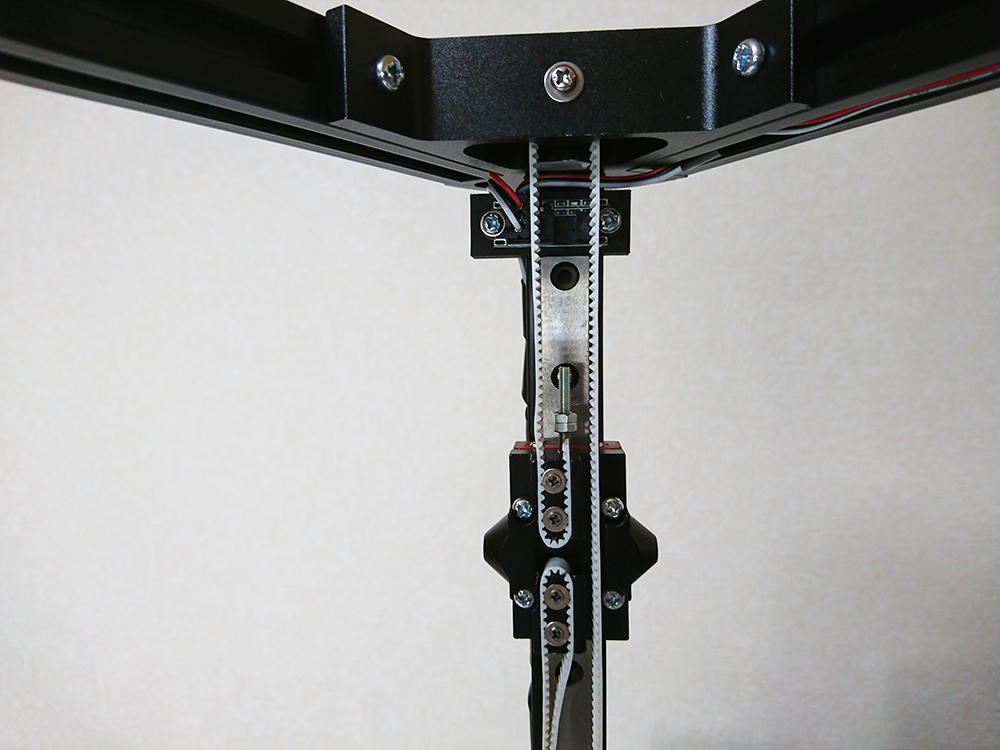
次はタイミングベルトを装着。
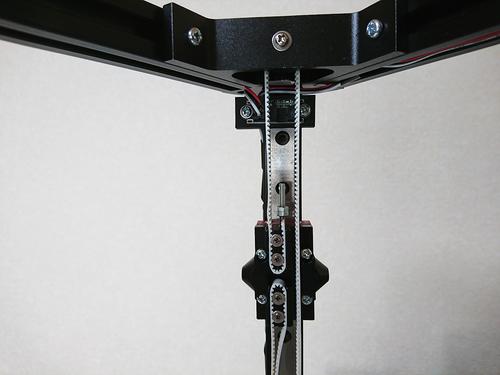
タイミングベルトの先をタイラップで留めたかったけど、
上側は光学エンドストップに干渉しそうなのでちょっと保留。
下は問題なく留められそうなので後から留めとこう。
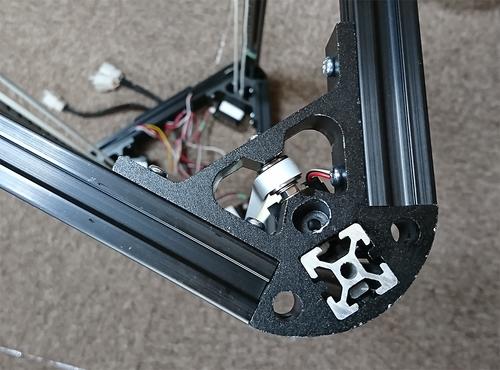
どうもY軸のプーリー↑がぎこちない。
手でベルトを動かすと、プーリーからコツコツ音がする。
これはベアリングの交換が必要かな。
型番はF623ZZ 3*10*4
これに合致すればどこで作っているものでもいいみたい。
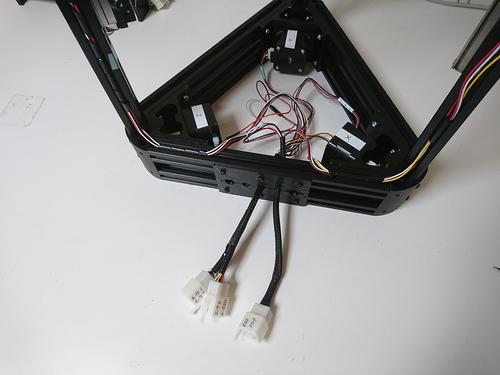
配線はこんな感じかな。
ではモーターの極性チェックとホームコマンドの動作確認。
おっと、一回目はXYZ全てのキャリッジが下に降りてしまいました。
電源切って緊急停止。
極性が逆ですね。おかしいな。
どこかでコネクタが逆さまになっているようだ。
再確認してみたが、ケーブルと中間のカプラに接続ミスはない。
つまりはArduinoの接続が逆になっているということだが、
MarlinのConfigを直してもいいけど、面倒なのでコネクタの方を付けなおして対応。
(更に調べたが、どうやら手元に残していた資料が間違っていたようで、
今回付け直した向きが正解だったようだ)
動画は正常動作のものです。
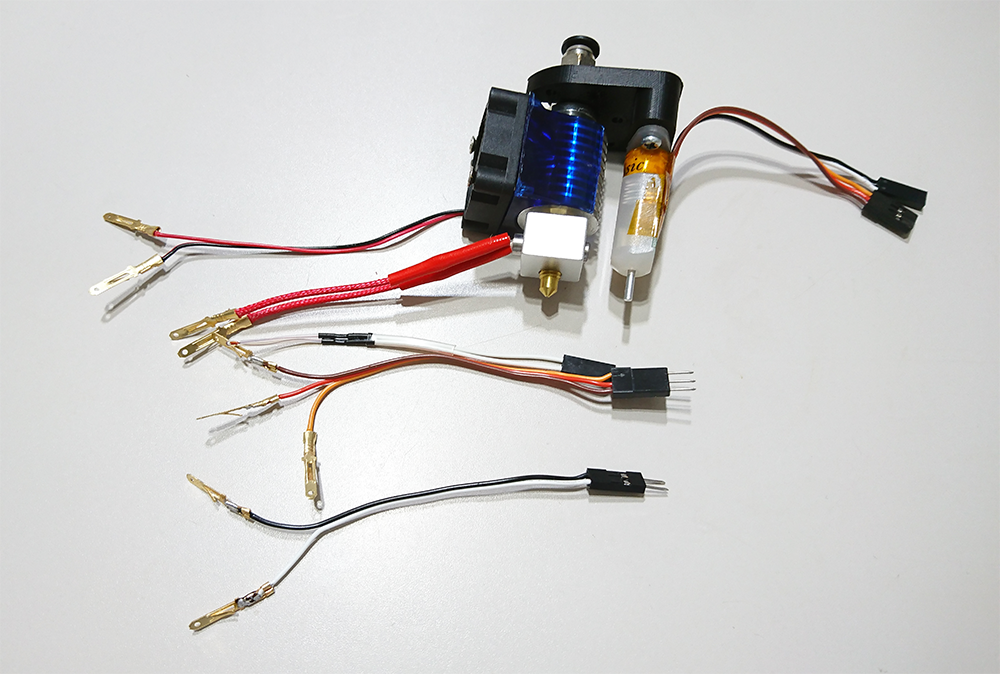
次はノズル周りの配線。

それぞれの配線を短くカット。
ノズルやヒートブロック、ヒーター、サーミスタは
いい機会なので新品に。
いつも通りピンを圧着し、念のためのハンダ付け。

長さを考慮しながらの圧着はちょっと手間がかかるなぁ(;´Д`)

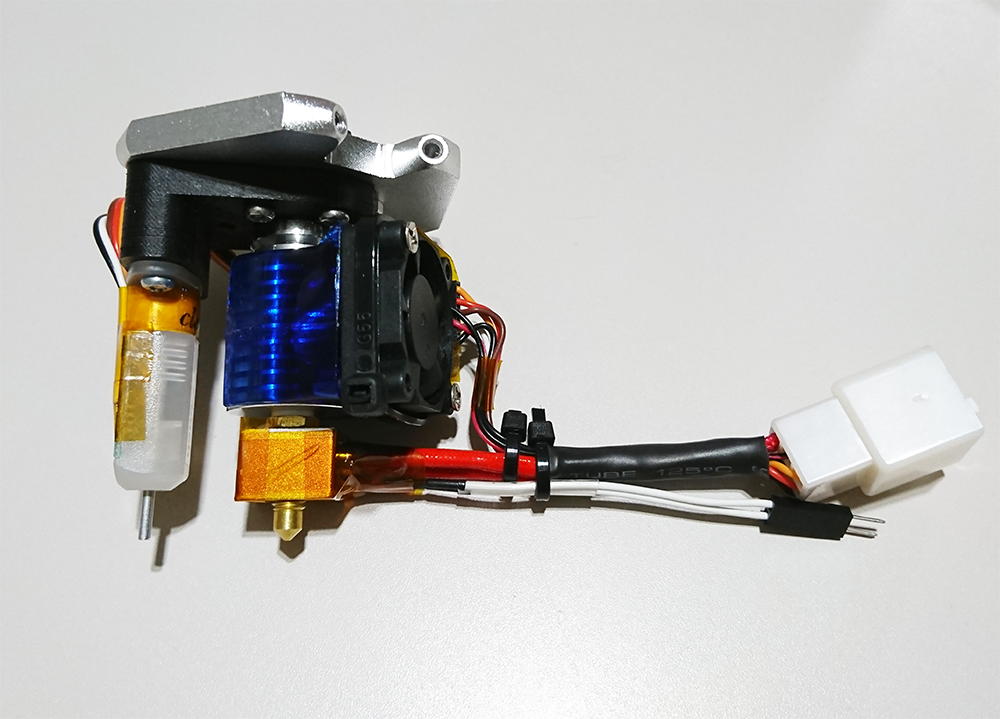
全部連結。思ったより配線が長かったかな。
スパイラルあたりを巻いてやらないと
ケーブルが軟すぎて根本が断線しそう。
写真にはBLTouchが写り込んでいますが、
これの使い方はまた後日書きます。
ここでトラブル発生。
動作確認を行ったのですが、ファンが回らない。
単独で12Vを掛けても反応しないので配線ミスではなさそう。
そう言えば、前からカラカラ音がしてたものなぁ・・(;´Д`)
ここまで組んでおきながら交換を余儀なくされました。
部品が届くまでノズル周りは保留に。
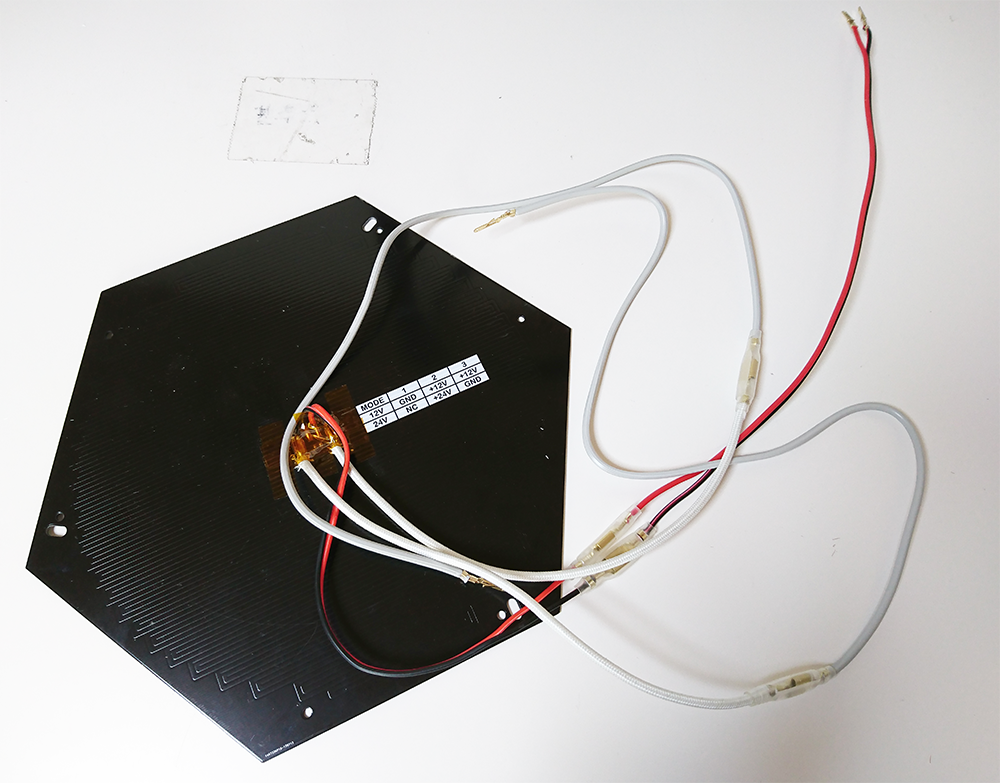
先にヒートベッドにいきます。
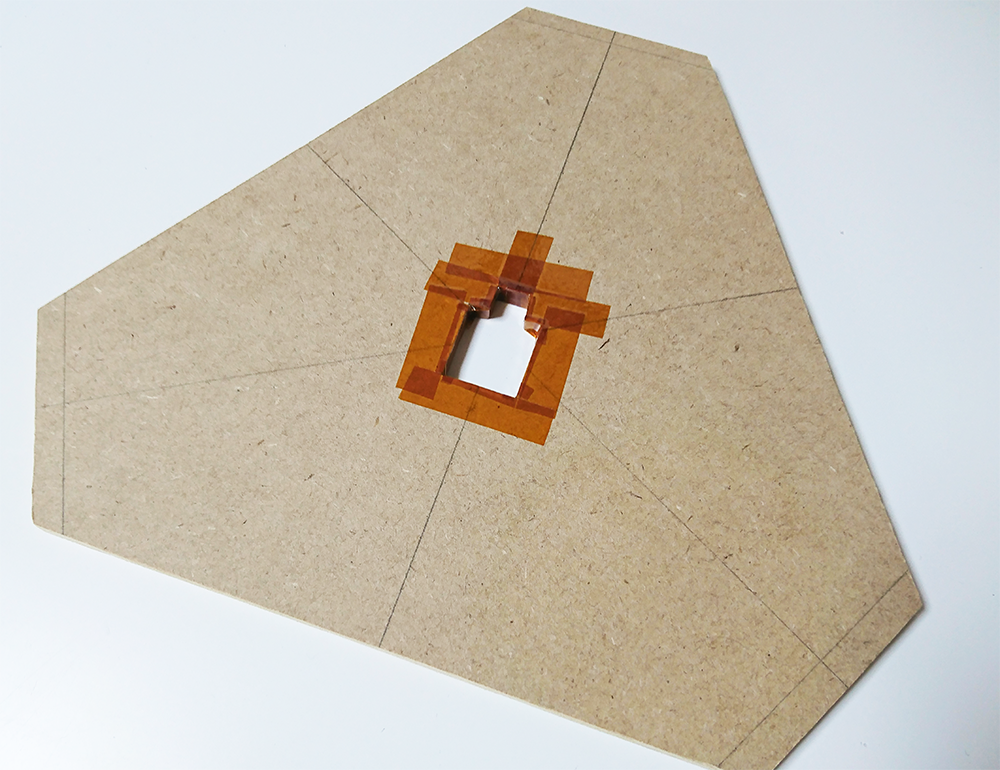
万が一を考えて、ヒートベッドの端子部分にカプトンテープを貼ります。
下に置く予定のMDFも、カプトンテープを張っておきます。
貼り方が汚いのは愛嬌(๑´ڡ`๑)
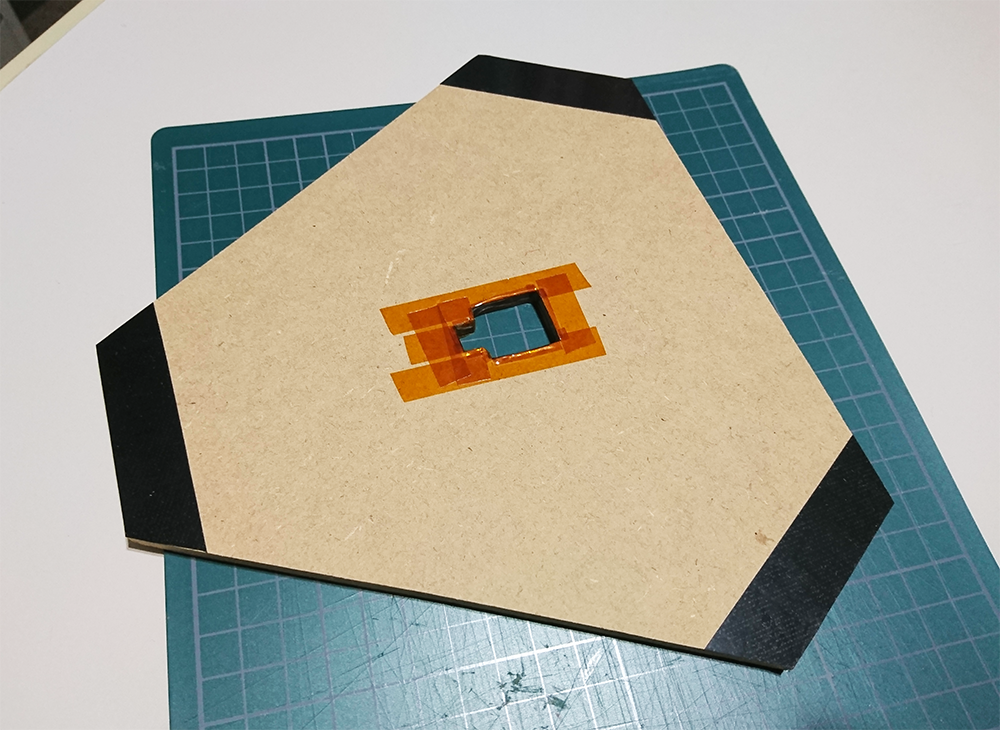
ベッドを置いた時に
MDFの見える箇所が見窄らしいので
黒の耐熱絶縁テープを貼ってみました。
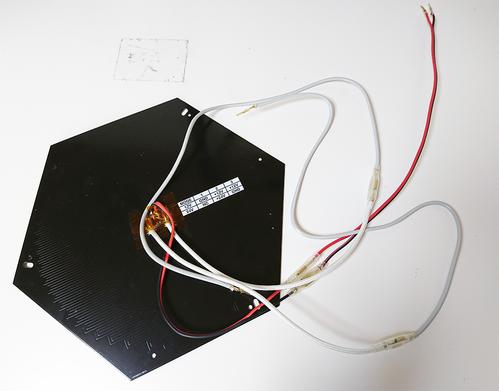
ベッドの配線をいきなりコネクタに接続すると
ベッド下のメンテナンス時に不便なので、
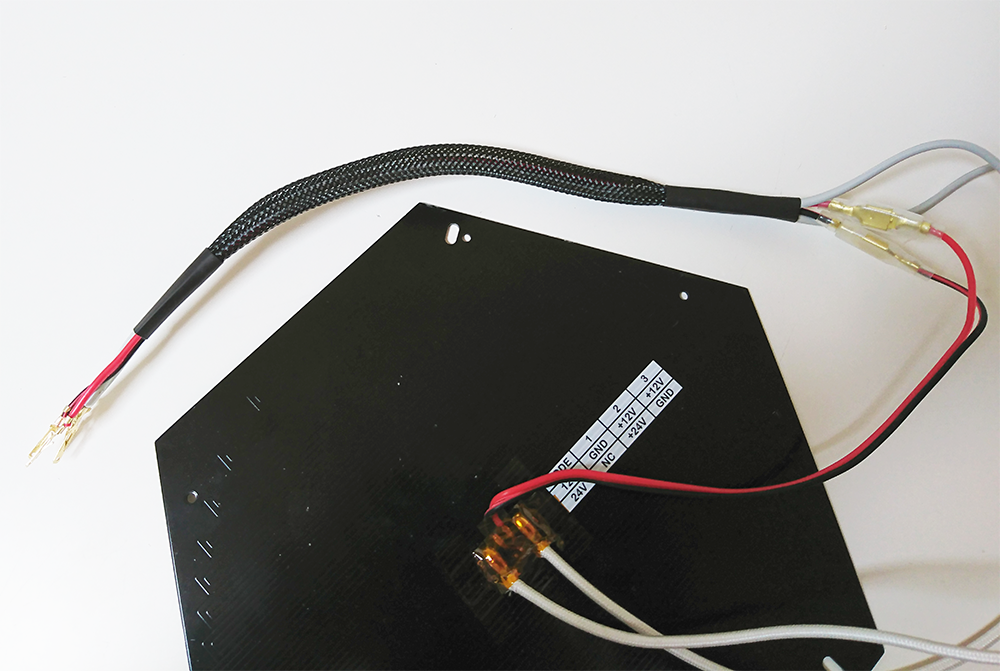
平型ギボシを介して接続することにしました。
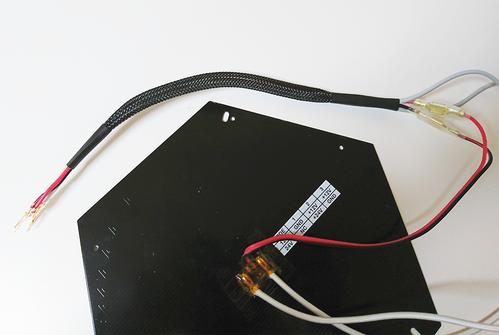
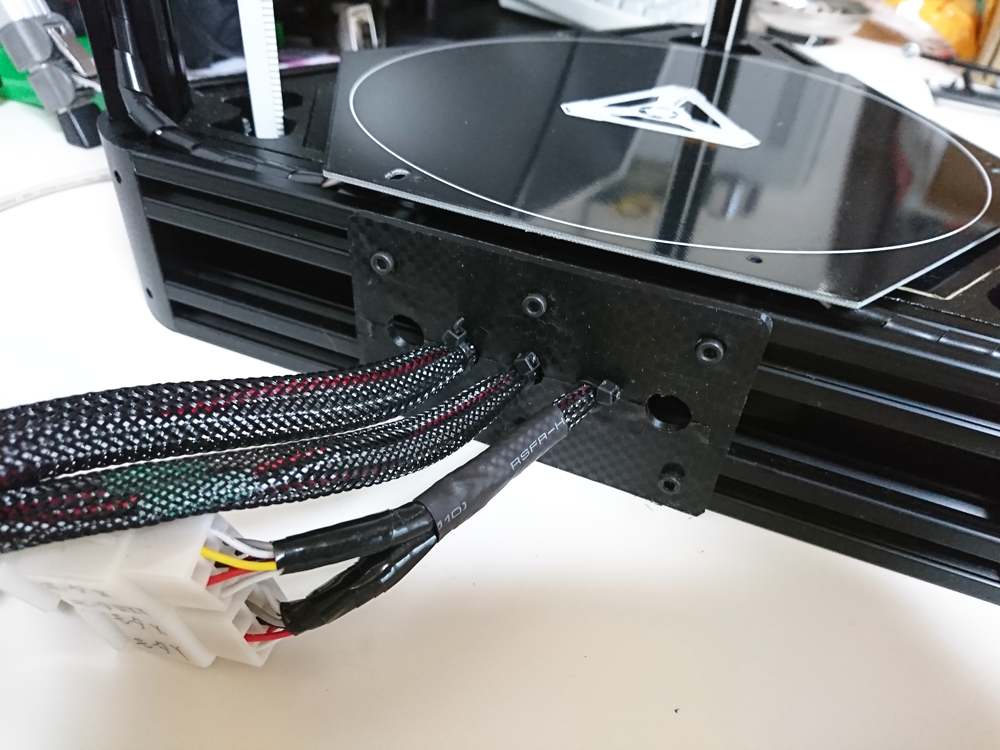
ケーブルを黒ナイロンの編組ケーブルスリーブでシールド。

背面のパネルに挟んで、固定。
ケーブルが抜けないように内側と外側をタイラップ留め

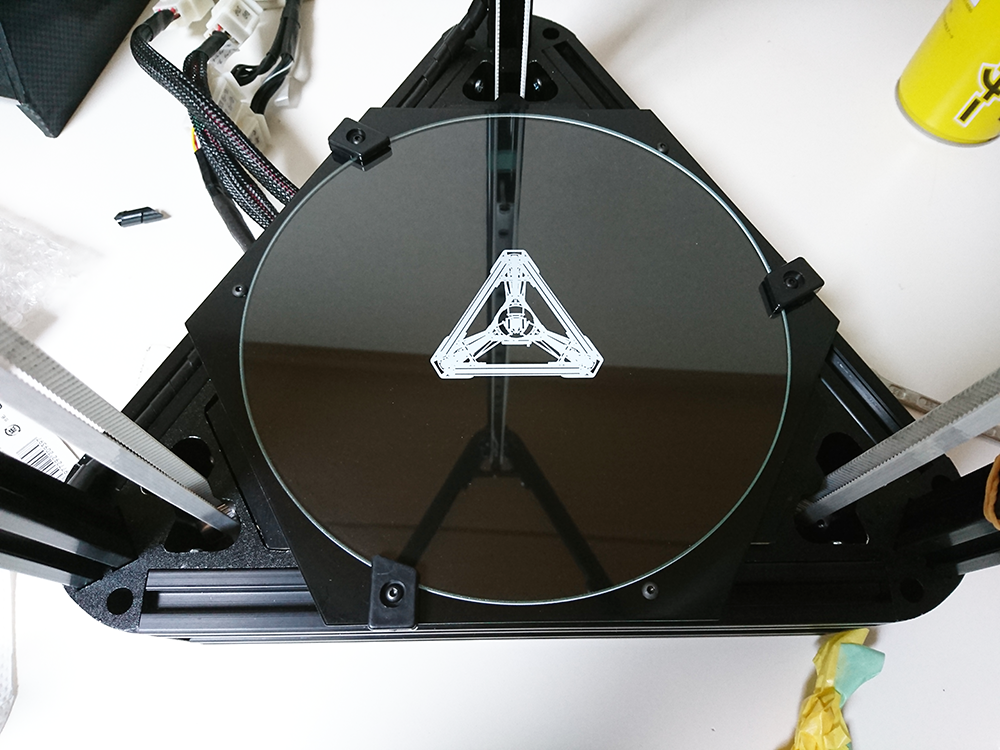
MDFをヒートベッドの下に置いて、
その上からベッドを載せますが、固定に関しては、

↑Micromakeが最近使っているベッド固定パーツが
新たに買ったヒートベッドに付属してきていたので、
ここで利用します。

素直に付けるとこんな感じ。
前のガラスは完全なフラットではなかったので、今回新調しましたが、
どっちにしても古いのは直径が合わず、新しい固定具では使えませんでした。
新しいガラス買っておいて良かった(;´Д`)
留め具を触ってみた感じ、
ガラスをしっかり固定しているようで安心感はありますが、
脱着しようとしたら下のヒートベッドまで外さないとできないという面倒くさ仕様。
つまりガラスを外して洗うなんてことは出来なさそう。

ガラスを外せないとなると、かなり面倒なので、

私オリジナルの↑コレを使って手回しネジを上から付ける形にしました。
ここまでやっておいて、目標の100度まで行かないと意味がない。
当然実験します。

ヽ(´ー`)ノ 余裕~
スルスルと上昇してあっというまに100度~
これでベッド周りは完成だわ。

保留にしてたベルトのタイラップ留めも
一番細いもので締めたら案外うまく行きました。
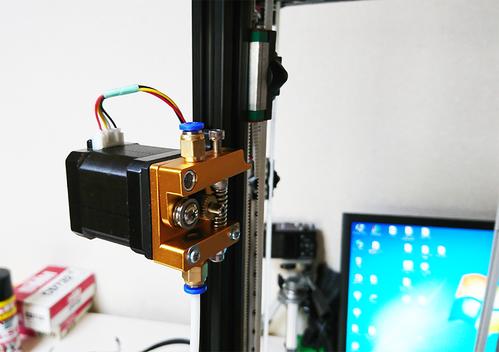
柱にエクストルーダーを取り付け。
これはネジで締めるだけなので簡単。

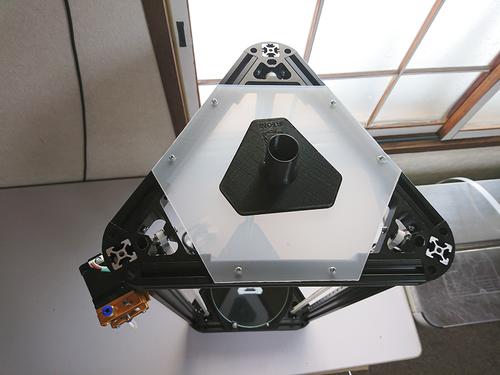
配線とは関係ないけど、
ヒートベッドと同じ形の板を用意しました。
これは上面に置くフィラメントホルダを支えるものとして
今回作ったものです。

周りにT型ナットをつけ、中央にもM3の穴を開けました。
思いのほか強く硬い素材で、弾性もあるので、
手で割ることも出来なければ、カットするのも一苦労でした。
穴は手でやっていては日が暮れるので電ドルで。

固定完了。
フィラメントは1kgにもなるので、
印刷中の重心を考えたら中央に置くのがベスト。
これで印刷中のガタツキも軽減できるかな。

フィラメントホルダのベアリングを取り付け。
ホルダ完成。重さで板が反ってしまわないか不安だったけど、
フィラメントを載せても反りが起きず、干渉なしでクルクル回りました。
予定通り( ´∀`)bグッ!
もし長期間使っていて干渉するようになったらベアリング位置を調整するかな。
そして、ベアリングが到着。

今後も交換すると思うので保守パーツとして10個セットを注文してました。
それでもマックポテトLより安い(;´Д`)
交換したら音が消えましたよ。
そして今度は、3cmx3cmファンが到着。

例のごとく端子はカシメるだけじゃなくてハンダ付。
気にしすぎと言われてもいいのだ。手間かければそれだけ安心感が増すのだ(๑´ڡ`๑)

これで組み上げ完了。
ヒートブロックやエフェクターに繋がるケーブルは、
イマイチ強度が足りなくて、根本が断線するような気がしたので
針金の台座をつくって、それで固定する形にしました。
想定よりすこし不格好になってしまいましたが安定感が増しています。
さて次は調整編。更新は何時になるかなぁ
部品調達等を行なっていると3週間とか簡単に待たされてしまうので
その影響とご理解ください(;´Д`)
そのかわりボリュームは有りますのでスクロールが長いです。
ボディが出来上がったので、次は配線ですが、
まずは動作確認が簡単なエンドストップから始めます。
エンドストップは上部に取り付けられるので
下まで配線を通すと長さが結構必要なのです。
エンドストップの付属配線をそのまま使用すると、
3つあるエンドストップのうち
1つがどうしても長さが足りないので延長いたしました。
配線の先端をコネクタ金具を圧着。
あとから接触不良などで悩みたくないので、
更にハンダで確実に繋げます。
あと注意するべき点は、センサーの接続先を確認することですね。
以前、実験で使用した赤いボディの光学エンドストップと
配線の色や配置が違っております。
赤がシグナル。黒がGND。白がVCC。
間違えないように慎重にカプラへ入れます。
間違えるとArduinoが燃えます(;´Д`)
タイミングベルトがセンサーのすぐ前を通るので、
干渉しないように後ろに配線を回してコネクタ接続。
ある程度作業が落ち着いたらタイラップを利用して配線を固定するかな。
事前に作っておいた、ケーブル固定パネルでサンド。
完成イメージが湧いてきました。
Arduinoを接続してセンサーの動作確認してみました。
ピンを検知してLEDが点灯しますね。
センサーの動作は問題なさそうです。
次はM119コマンドを用いてXYZ軸の間違いや極性の確認を行います。
左から、フリー、X軸on、Y軸on、Z軸on
z_minはオートレベリング用のものなので、この場はスルーします。
コマンドの回答を見る限り軸間違いはなさそうです。
極性も当初の予定通り変更なしで済みそうです。
次はモーターの配線。
エンドストップと同じようにピンを圧着。はんだ付き。
注意点は配線を16本使うので、使うカプラは2個。
接続するカプラを間違えないようにマーキングするくらいかな。
モーターに接続。
配線が多くなってきたけど、前に比べたら全然スカスカ。
束ねればスッキリするね。
次はタイミングベルトを装着。
タイミングベルトの先をタイラップで留めたかったけど、
上側は光学エンドストップに干渉しそうなのでちょっと保留。
下は問題なく留められそうなので後から留めとこう。
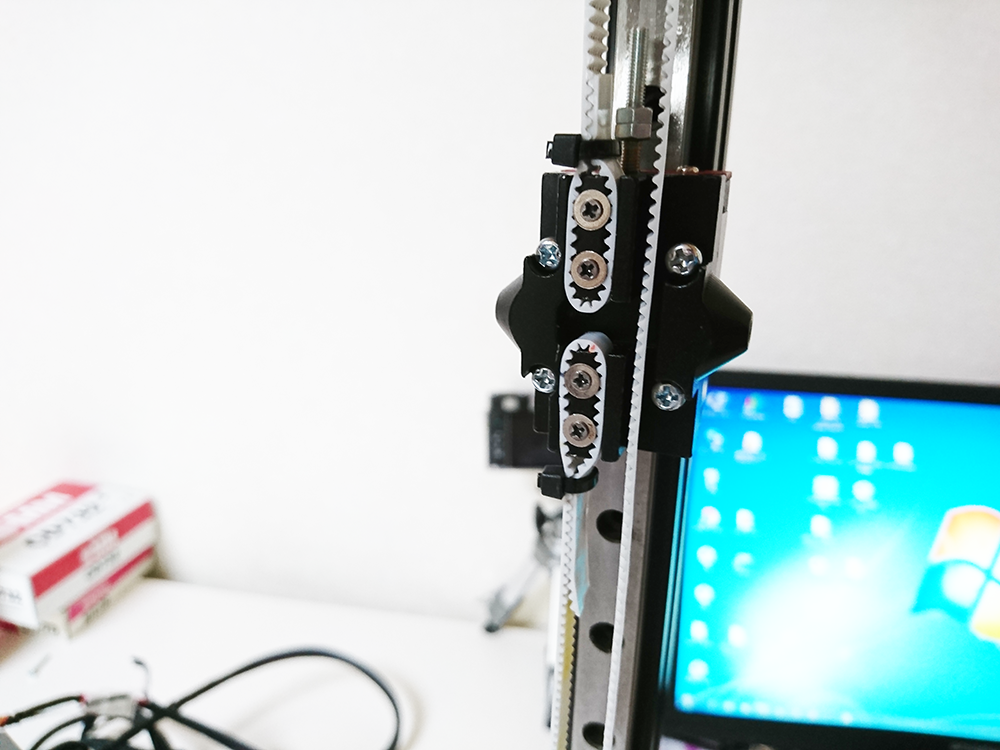
どうもY軸のプーリー↑がぎこちない。
手でベルトを動かすと、プーリーからコツコツ音がする。
これはベアリングの交換が必要かな。
型番はF623ZZ 3*10*4
これに合致すればどこで作っているものでもいいみたい。
配線はこんな感じかな。
ではモーターの極性チェックとホームコマンドの動作確認。
おっと、一回目はXYZ全てのキャリッジが下に降りてしまいました。
電源切って緊急停止。
極性が逆ですね。おかしいな。
どこかでコネクタが逆さまになっているようだ。
再確認してみたが、ケーブルと中間のカプラに接続ミスはない。
つまりはArduinoの接続が逆になっているということだが、
MarlinのConfigを直してもいいけど、面倒なのでコネクタの方を付けなおして対応。
(更に調べたが、どうやら手元に残していた資料が間違っていたようで、
今回付け直した向きが正解だったようだ)
動画は正常動作のものです。
次はノズル周りの配線。
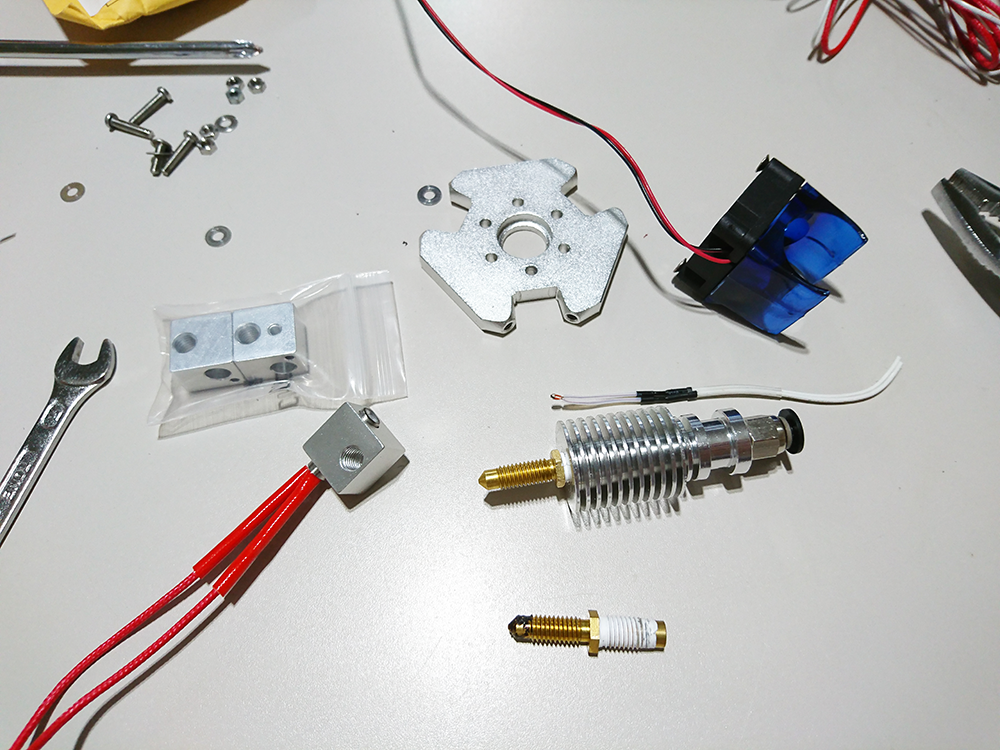
それぞれの配線を短くカット。
ノズルやヒートブロック、ヒーター、サーミスタは
いい機会なので新品に。
いつも通りピンを圧着し、念のためのハンダ付け。
長さを考慮しながらの圧着はちょっと手間がかかるなぁ(;´Д`)
全部連結。思ったより配線が長かったかな。
スパイラルあたりを巻いてやらないと
ケーブルが軟すぎて根本が断線しそう。
写真にはBLTouchが写り込んでいますが、
これの使い方はまた後日書きます。
ここでトラブル発生。
動作確認を行ったのですが、ファンが回らない。
単独で12Vを掛けても反応しないので配線ミスではなさそう。
そう言えば、前からカラカラ音がしてたものなぁ・・(;´Д`)
ここまで組んでおきながら交換を余儀なくされました。
部品が届くまでノズル周りは保留に。
先にヒートベッドにいきます。

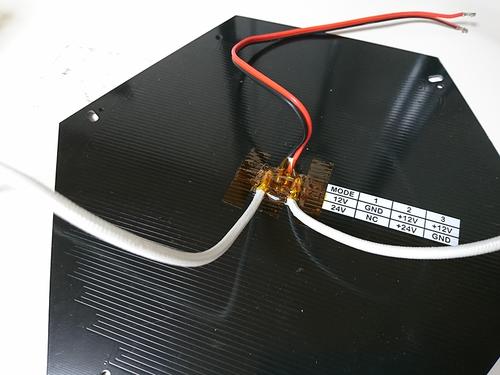
万が一を考えて、ヒートベッドの端子部分にカプトンテープを貼ります。
下に置く予定のMDFも、カプトンテープを張っておきます。
貼り方が汚いのは愛嬌(๑´ڡ`๑)
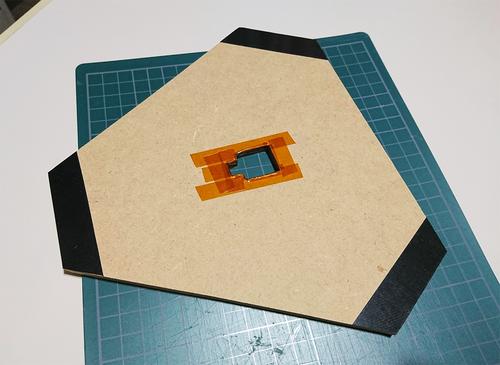
ベッドを置いた時に
MDFの見える箇所が見窄らしいので
黒の耐熱絶縁テープを貼ってみました。
ベッドの配線をいきなりコネクタに接続すると
ベッド下のメンテナンス時に不便なので、
平型ギボシを介して接続することにしました。
ケーブルを黒ナイロンの編組ケーブルスリーブでシールド。
背面のパネルに挟んで、固定。
ケーブルが抜けないように内側と外側をタイラップ留め

MDFをヒートベッドの下に置いて、
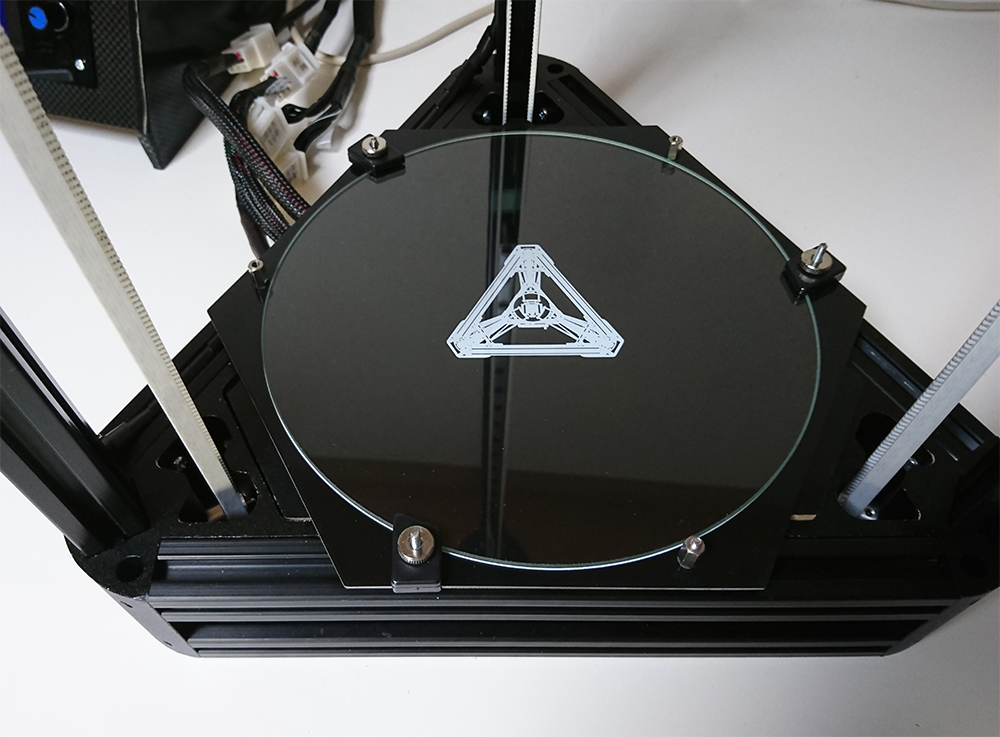
その上からベッドを載せますが、固定に関しては、

↑Micromakeが最近使っているベッド固定パーツが
新たに買ったヒートベッドに付属してきていたので、
ここで利用します。
素直に付けるとこんな感じ。
前のガラスは完全なフラットではなかったので、今回新調しましたが、
どっちにしても古いのは直径が合わず、新しい固定具では使えませんでした。
新しいガラス買っておいて良かった(;´Д`)
留め具を触ってみた感じ、
ガラスをしっかり固定しているようで安心感はありますが、
脱着しようとしたら下のヒートベッドまで外さないとできないという面倒くさ仕様。
つまりガラスを外して洗うなんてことは出来なさそう。
ガラスを外せないとなると、かなり面倒なので、

私オリジナルの↑コレを使って手回しネジを上から付ける形にしました。
ここまでやっておいて、目標の100度まで行かないと意味がない。
当然実験します。

ヽ(´ー`)ノ 余裕~
スルスルと上昇してあっというまに100度~
これでベッド周りは完成だわ。
保留にしてたベルトのタイラップ留めも
一番細いもので締めたら案外うまく行きました。
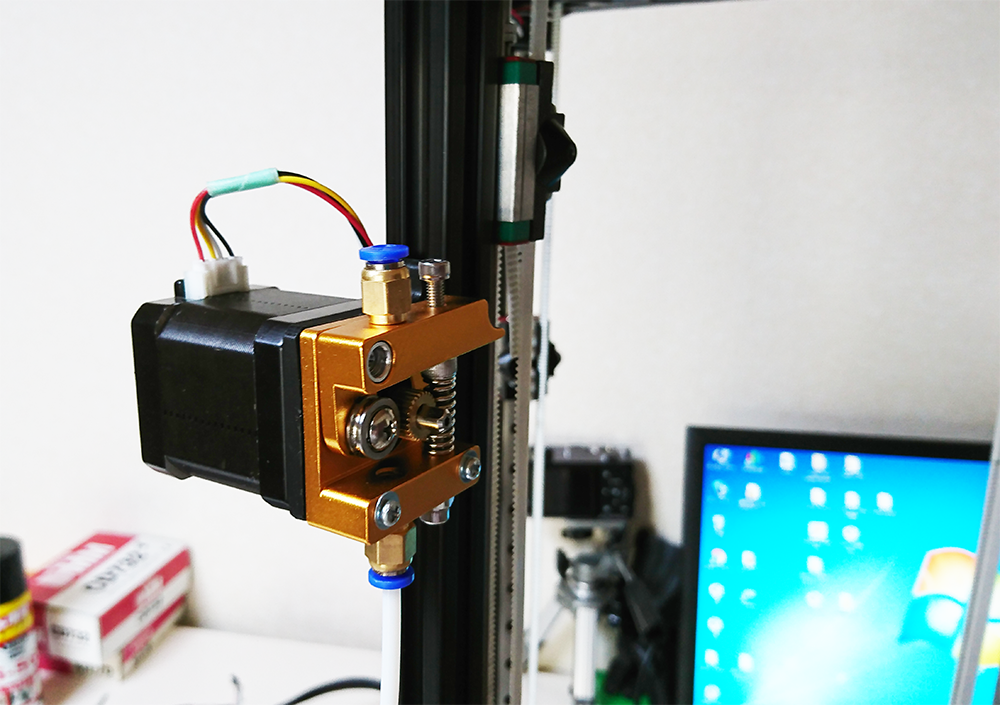
柱にエクストルーダーを取り付け。
これはネジで締めるだけなので簡単。

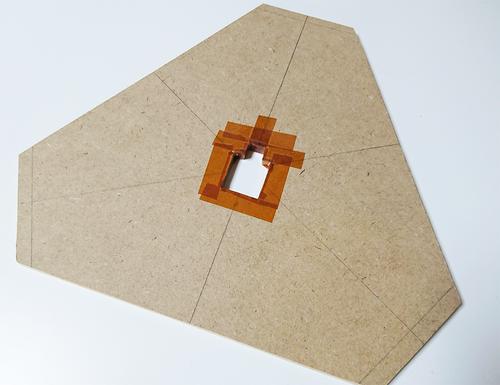
配線とは関係ないけど、
ヒートベッドと同じ形の板を用意しました。
これは上面に置くフィラメントホルダを支えるものとして
今回作ったものです。
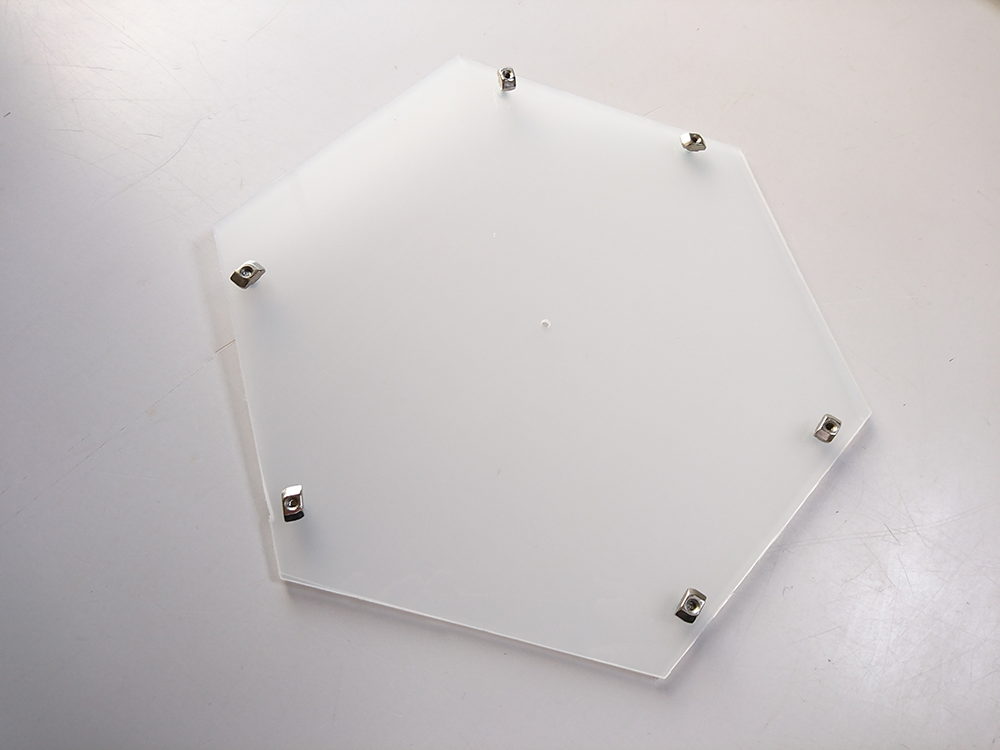
周りにT型ナットをつけ、中央にもM3の穴を開けました。
思いのほか強く硬い素材で、弾性もあるので、
手で割ることも出来なければ、カットするのも一苦労でした。
穴は手でやっていては日が暮れるので電ドルで。

固定完了。
フィラメントは1kgにもなるので、
印刷中の重心を考えたら中央に置くのがベスト。
これで印刷中のガタツキも軽減できるかな。

フィラメントホルダのベアリングを取り付け。
ホルダ完成。重さで板が反ってしまわないか不安だったけど、
フィラメントを載せても反りが起きず、干渉なしでクルクル回りました。
予定通り( ´∀`)bグッ!
もし長期間使っていて干渉するようになったらベアリング位置を調整するかな。
そして、ベアリングが到着。

今後も交換すると思うので保守パーツとして10個セットを注文してました。
それでもマックポテトLより安い(;´Д`)
交換したら音が消えましたよ。
そして今度は、3cmx3cmファンが到着。
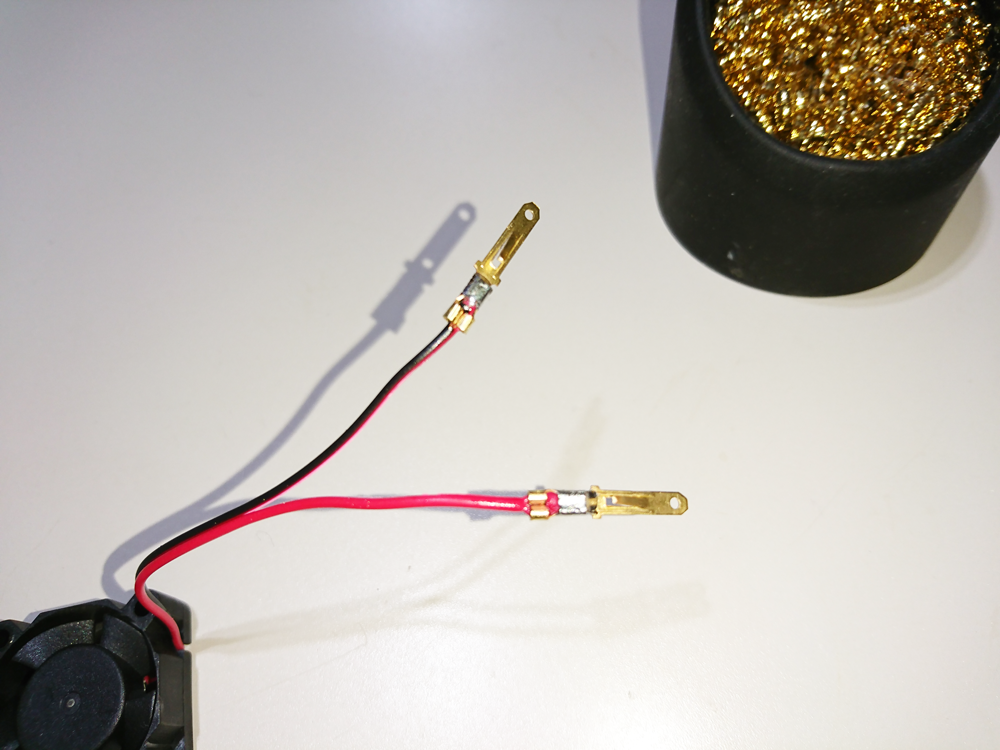
例のごとく端子はカシメるだけじゃなくてハンダ付。
気にしすぎと言われてもいいのだ。手間かければそれだけ安心感が増すのだ(๑´ڡ`๑)

これで組み上げ完了。
ヒートブロックやエフェクターに繋がるケーブルは、
イマイチ強度が足りなくて、根本が断線するような気がしたので
針金の台座をつくって、それで固定する形にしました。
想定よりすこし不格好になってしまいましたが安定感が増しています。
さて次は調整編。更新は何時になるかなぁ
 2018.01.24 00:10
|
2018.01.24 00:10
| 







