3D-PRT12)モーターに配線、ヒートベッドにサーミスタを付ける
2016.04.12
今日は細かい部分の処理をこなしていきます。
使用ネジは以下の通り
<基盤固定用>
M3x25mm 3本
M3六角ナット 3個
<バックパネル固定>
M3x8mm 6本
M3T型ナット 6個
まずは、この小さいヒートシンク。これはモータードライバーのチップに付けます。


こんな感じですね。ヒートシンク裏には両面テープが付いてますので、
皮膜を剥いで付けるだけ。簡単ですね。
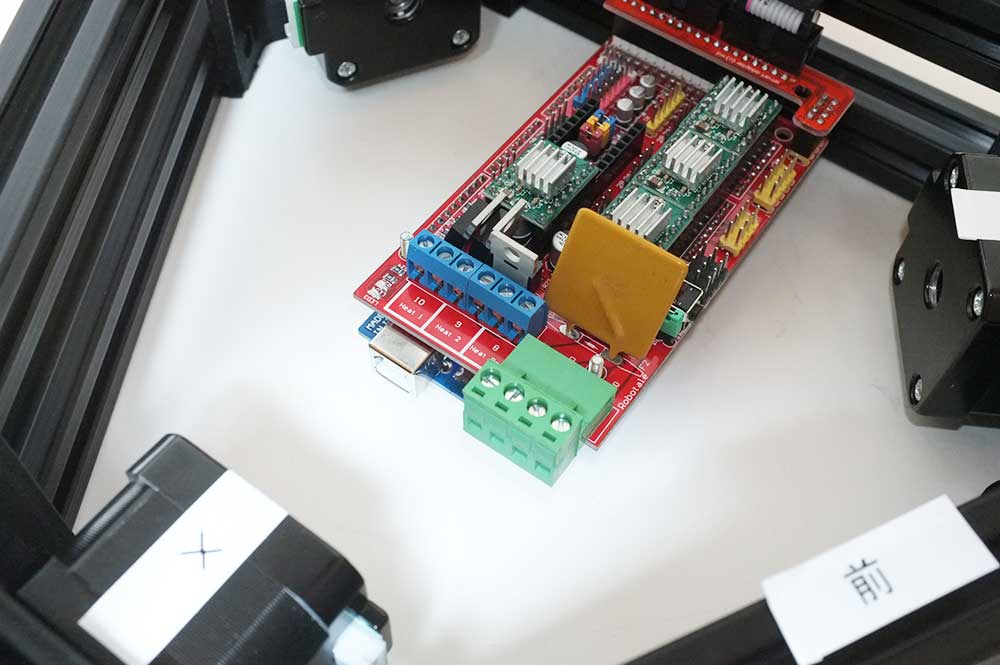
次はArduino + Ramps基板を固定します。
イメージ的にはこんな感じ↓

使用するネジはM3x25mm3本とM3ナット3個です。
取り付け位置は写真の通りです。


ネジを通してナットを締めるだけの簡単なお仕事です。
液晶に繋がる平型ケーブルの取り回しが少し面倒ですね。
いったん平型ケーブルを外して基板をを固定します。
と、その前に、平型ケーブルに油性マジックで、
念のため、どっちのケーブルがどっちのコネクタに刺さっていたかマーキングしておきましょうかね。
これで挿し間違えないように予防できますね。
次はモーターに配線を行います。
こちらも簡単。付属のケーブルを挿すだけ。コネクタの形状で向きが決まっており、
間違った方向には刺さりません。


モーターに配線を挿したら、メモ紙に配線の様子をメモしておきます。
写真で残しておくとなおいいですね。
私の場合は、モーターの軸を奥側にし、コネクタを左にした時、
上から赤、灰、白、黒です。..._〆(゚▽゚*) メモメモ
エクストルーダーのモーターにも配線をします。
同じように配線色をメモっておきます。
私の配線は左から黒、白、黄、赤です。
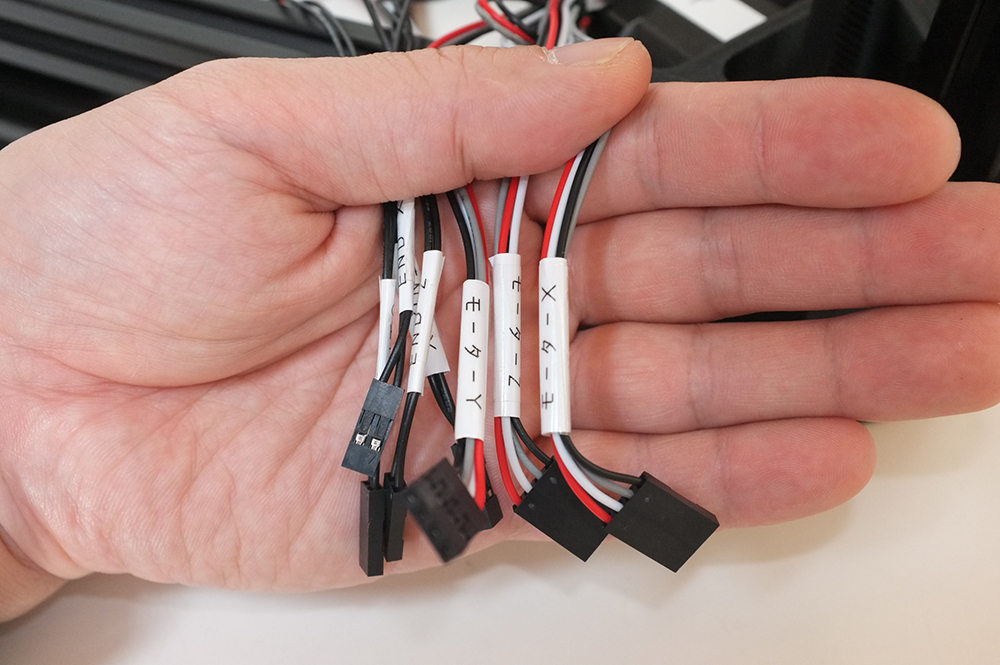
ついでに、ケーブルにどのモーターの配線かラベルを付けておきます。
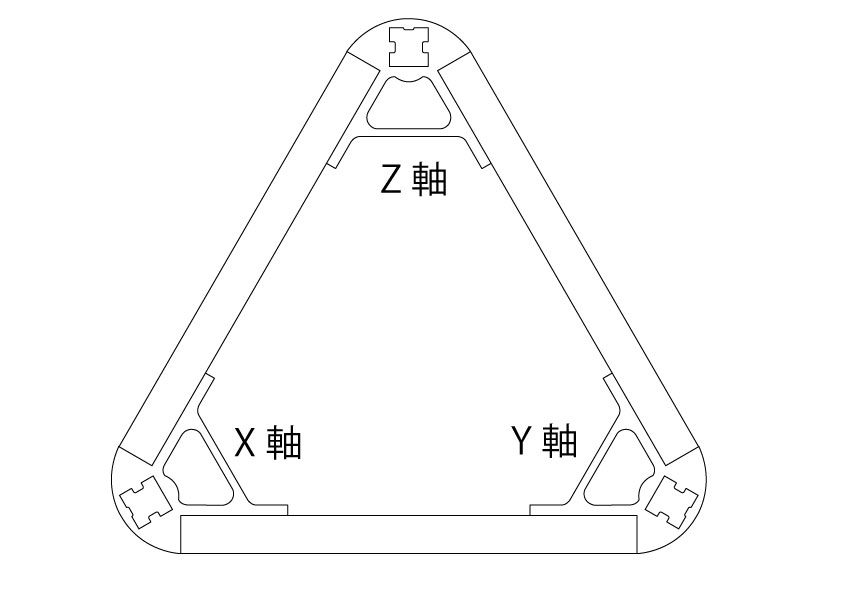
XYZの位置関係は、アルミフレームの三角形のうち底辺を自分に向けたとき、
左手前をX、右手前をY、奥をZとします。

XとYをつなげるアルミ辺は今後正面という扱いになりますので、
液晶パネルもこの場所につけることになります。
上部三角コーナーから垂れてきている、
エンドスイッチの配線にもX、Y、Zがわかるようにラベルを貼っておきます。
ついでなので、エフェクターからも来ている配線にも
オートレベリング用のスイッチとわかるようにラベルを貼っておきます。

まとめるとこんなかんじ↑
テプラの熱収縮ラベルがあればもっとキレイなんでしょうけど・・
ウチにあるのはカシオのネームランドorz
次は前回作ったバックパネルを取り付けます。
固定はM3x8mm6本とM3T型ナット6個です。

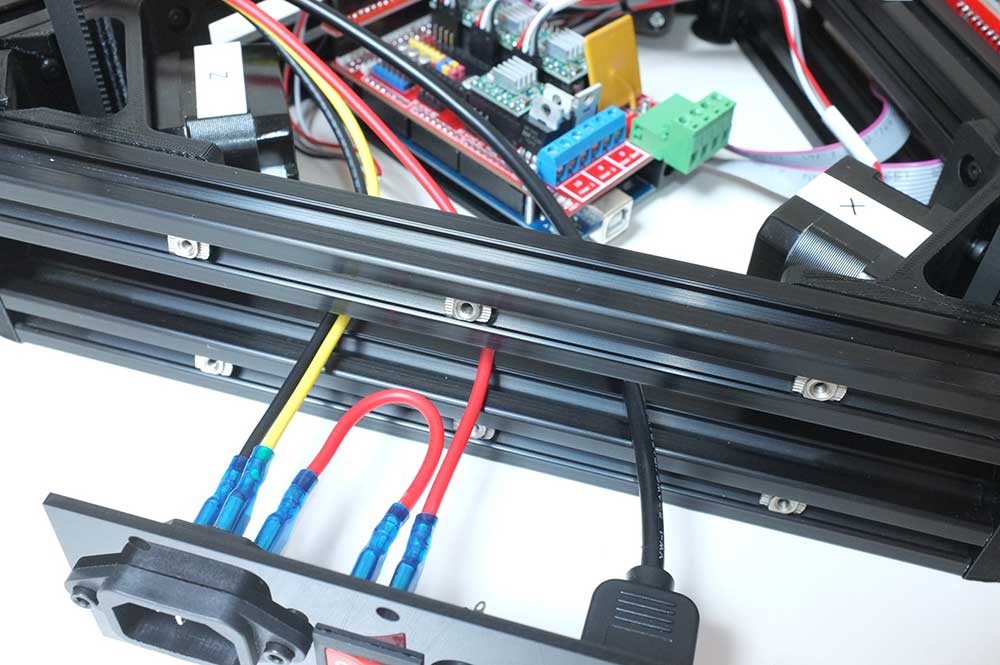
配線をアルミフレームの中央を通して内側に引き込みます。

先にパネルにナットを付けてからネジを回す方法でも付けられますが、
ナットをアルミフレームに入れてナットを縦向きを変えてから、ネジをあてがった方が
正確で楽に留められる気がしました。

次は、ヒートベッドにサーミスタを取り付けます。
※うちのヒートベッド用サーミスタは同梱ミスで欠品してましたが、
販売元から送ってもらい、今日、4月12日に到着しました。
書留扱いで送られてきたのがちょっと驚きです。
ヒートベッドがセンサー内蔵してないので、付属のサーミスタを
耐熱性の強いカプトンテープで取り付ける必要があります。
カプトンテープはヒートブロックで使う重要度の高いテープですが、
ヒートベッドの貼り付けにも使います。
キットには付属していないので自分で用意する必要があります。
素性の解らない安いものから一流メーカーの高いものまでありますが、
本当の意味で耐熱といえる製品は寺岡か3Mを買うのが無難という話です。
実際に半田ごてを当てて実験する動画も見ましたが
200度もの高温で事故などあったら火事になりかねないので
私は信頼性重視ということで寺岡のをアマゾンで購入しました。
使う量は全体で2mも無いので一番小さいパッケージを選びました。

次にサーミスタ。

簡単に言うと温度センサーなんですが、先を密着させて取り付ける必要があるので、
隙間がでないように貼り付けます。どうやら壊れやすいものらしいので、
取り扱いにビクビクです。
カプトンテープは初めて触れたのですが、思いのほか粘着力あるんですね。
ヒートベッドには、すでに電力供給用配線が2本ハンダで接続されているので、
それと束ねられるように下向きに貼り付けました。

だいぶ完成に近づいてきましたね。
ブログではスピーディーに作っているように見えますが
検証や修正などを繰り返してると時間があっという間に経ってしまいます。
今日の作業はとりあえずここまでです。
それではまた次回
使用ネジは以下の通り
<基盤固定用>
M3x25mm 3本
M3六角ナット 3個
<バックパネル固定>
M3x8mm 6本
M3T型ナット 6個
まずは、この小さいヒートシンク。これはモータードライバーのチップに付けます。

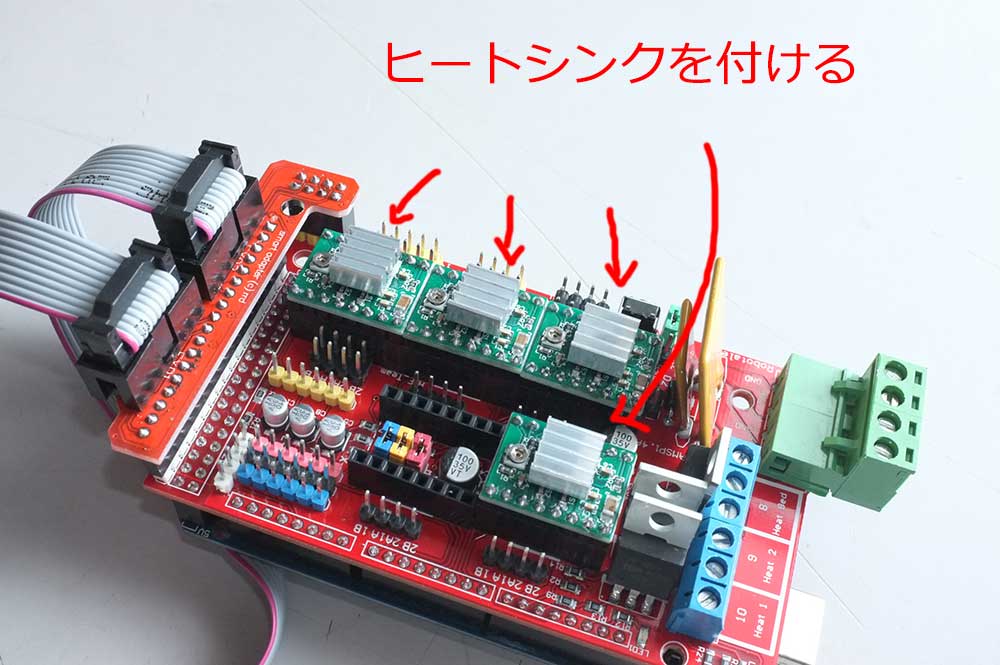
こんな感じですね。ヒートシンク裏には両面テープが付いてますので、
皮膜を剥いで付けるだけ。簡単ですね。
次はArduino + Ramps基板を固定します。
イメージ的にはこんな感じ↓

使用するネジはM3x25mm3本とM3ナット3個です。
取り付け位置は写真の通りです。

ネジを通してナットを締めるだけの簡単なお仕事です。
液晶に繋がる平型ケーブルの取り回しが少し面倒ですね。
いったん平型ケーブルを外して基板をを固定します。
と、その前に、平型ケーブルに油性マジックで、
念のため、どっちのケーブルがどっちのコネクタに刺さっていたかマーキングしておきましょうかね。
これで挿し間違えないように予防できますね。
次はモーターに配線を行います。
こちらも簡単。付属のケーブルを挿すだけ。コネクタの形状で向きが決まっており、
間違った方向には刺さりません。


モーターに配線を挿したら、メモ紙に配線の様子をメモしておきます。
写真で残しておくとなおいいですね。
私の場合は、モーターの軸を奥側にし、コネクタを左にした時、
上から赤、灰、白、黒です。..._〆(゚▽゚*) メモメモ
エクストルーダーのモーターにも配線をします。
同じように配線色をメモっておきます。
私の配線は左から黒、白、黄、赤です。
ついでに、ケーブルにどのモーターの配線かラベルを付けておきます。
XYZの位置関係は、アルミフレームの三角形のうち底辺を自分に向けたとき、
左手前をX、右手前をY、奥をZとします。
XとYをつなげるアルミ辺は今後正面という扱いになりますので、
液晶パネルもこの場所につけることになります。
上部三角コーナーから垂れてきている、
エンドスイッチの配線にもX、Y、Zがわかるようにラベルを貼っておきます。
ついでなので、エフェクターからも来ている配線にも
オートレベリング用のスイッチとわかるようにラベルを貼っておきます。
まとめるとこんなかんじ↑
テプラの熱収縮ラベルがあればもっとキレイなんでしょうけど・・
ウチにあるのはカシオのネームランドorz
次は前回作ったバックパネルを取り付けます。
固定はM3x8mm6本とM3T型ナット6個です。
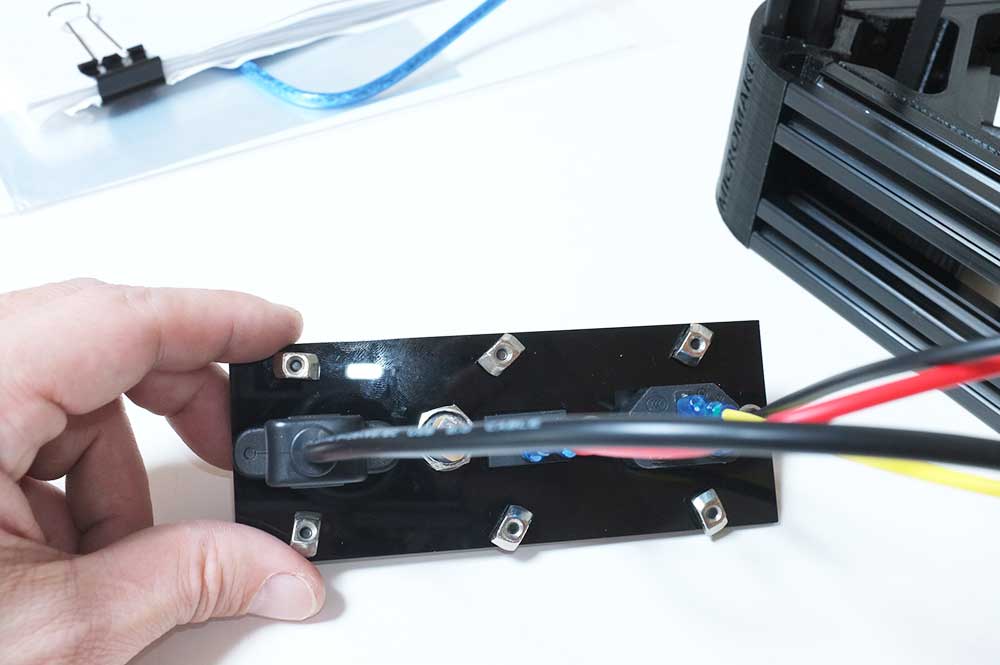
配線をアルミフレームの中央を通して内側に引き込みます。
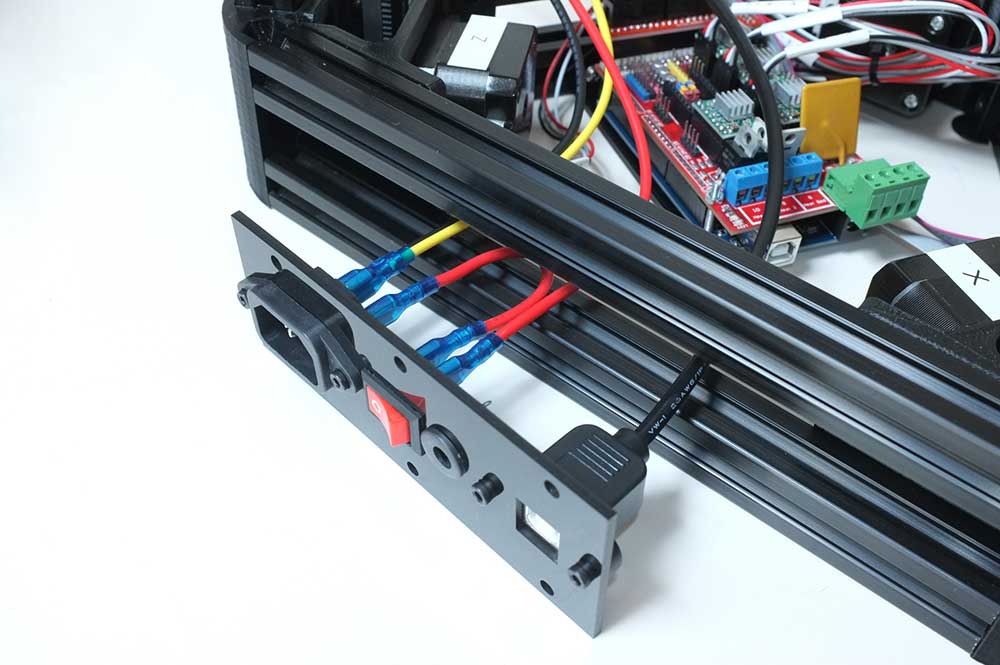
先にパネルにナットを付けてからネジを回す方法でも付けられますが、
ナットをアルミフレームに入れてナットを縦向きを変えてから、ネジをあてがった方が
正確で楽に留められる気がしました。
次は、ヒートベッドにサーミスタを取り付けます。
※うちのヒートベッド用サーミスタは同梱ミスで欠品してましたが、
販売元から送ってもらい、今日、4月12日に到着しました。
書留扱いで送られてきたのがちょっと驚きです。
ヒートベッドがセンサー内蔵してないので、付属のサーミスタを
耐熱性の強いカプトンテープで取り付ける必要があります。
カプトンテープはヒートブロックで使う重要度の高いテープですが、
ヒートベッドの貼り付けにも使います。
キットには付属していないので自分で用意する必要があります。
素性の解らない安いものから一流メーカーの高いものまでありますが、
本当の意味で耐熱といえる製品は寺岡か3Mを買うのが無難という話です。
実際に半田ごてを当てて実験する動画も見ましたが
200度もの高温で事故などあったら火事になりかねないので
私は信頼性重視ということで寺岡のをアマゾンで購入しました。
使う量は全体で2mも無いので一番小さいパッケージを選びました。

次にサーミスタ。

簡単に言うと温度センサーなんですが、先を密着させて取り付ける必要があるので、
隙間がでないように貼り付けます。どうやら壊れやすいものらしいので、
取り扱いにビクビクです。
カプトンテープは初めて触れたのですが、思いのほか粘着力あるんですね。
ヒートベッドには、すでに電力供給用配線が2本ハンダで接続されているので、
それと束ねられるように下向きに貼り付けました。

だいぶ完成に近づいてきましたね。
ブログではスピーディーに作っているように見えますが
検証や修正などを繰り返してると時間があっという間に経ってしまいます。
今日の作業はとりあえずここまでです。
それではまた次回
 2016.04.12 23:24
|
2016.04.12 23:24
| 


トラックバックURL
トラックバック一覧





