3D-PRT17)テスト用の数値を焼き込む
2016.05.06
今日は精度を出すための調整・・・の初期設定を行いたいと思います。
Kossel K800はArduinoにMarlinというファームウェアを
焼き付けることで動くようになっています。
そのファームウェアにボディの細かい数値を入れ込んで
初めて正確な印刷が出来る様になるのですが、
部品の工作精度が甘いので仕様表の値をそのまま当てはめてもまともに動きません。
しかも0.1mm精度の工作機械に対し定規やノギス、メジャーで計るには無理があります。
そこで実際に機械を動かして調整していくことになるわけですね。
まず動かすために間違い覚悟(定規などで適当に測ったもの)の数値情報を
Arduinoに焼き付けることにします。
Marlinのソースファイルは同梱されていたSDメモリに入っていました。
「kossel mini heated bed.zip」
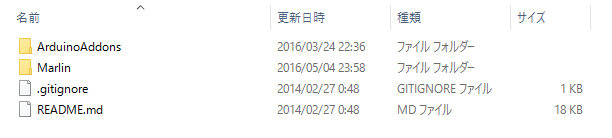
という圧縮ファイルです。解凍すると

kossel mini heated bed -------ArduinoAddons フォルダ
|
---Marlin フォルダ
|
---.gitignore
|
---README.md
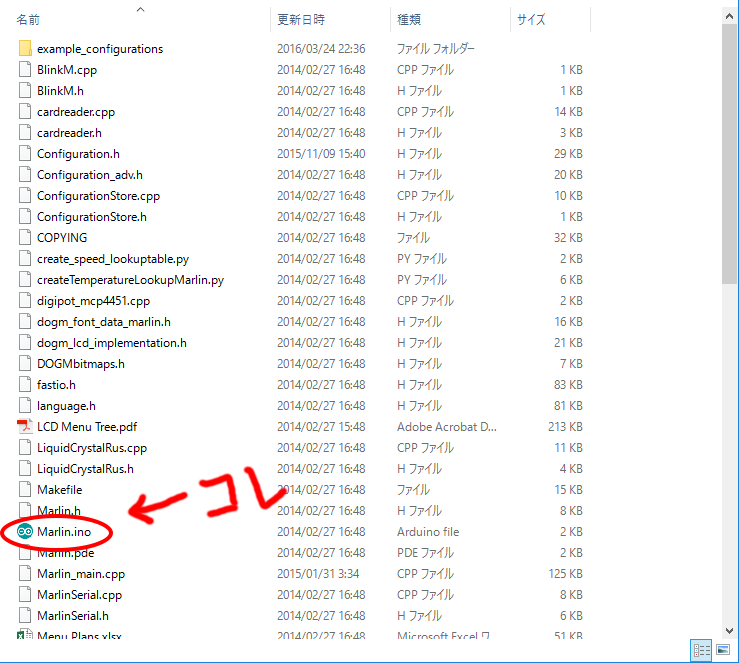
という形で展開されます。肝心のソースファイルはMarlinフォルダに格納されていました。
Marlin.inoというファイルがMarlinフォルダに入っているので実行してみます。

すると、先日インストールしたArduino IDE統合環境が起動し
関連のソースファイルを全部読み上げてくれます。

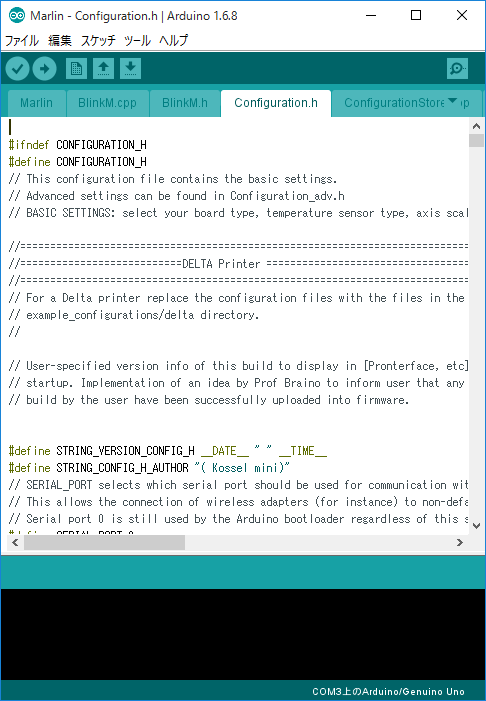
タブの中の「Configuration.h」をクリックします。

ここに書かれている内容にパラメータ情報がちりばめられています。
ここを変更しArduinoに焼き付けることでファームウェアの設定変更になります。
まずは、以下の数値を書き換えちゃいます。
順番や場所は様々なので、目視で見つけられない場合は検索機能を使うことにします。
・通信速度を設定する
#define BAUDRATE 250000 //Winでは250000で大抵動くようです。LINUXではエラーになるらしい。
・マザーボードの種類
#define MOTHERBOARD 33 //33番はRAMPS1.4(Power outputs: Extruder, Fan, Bed)
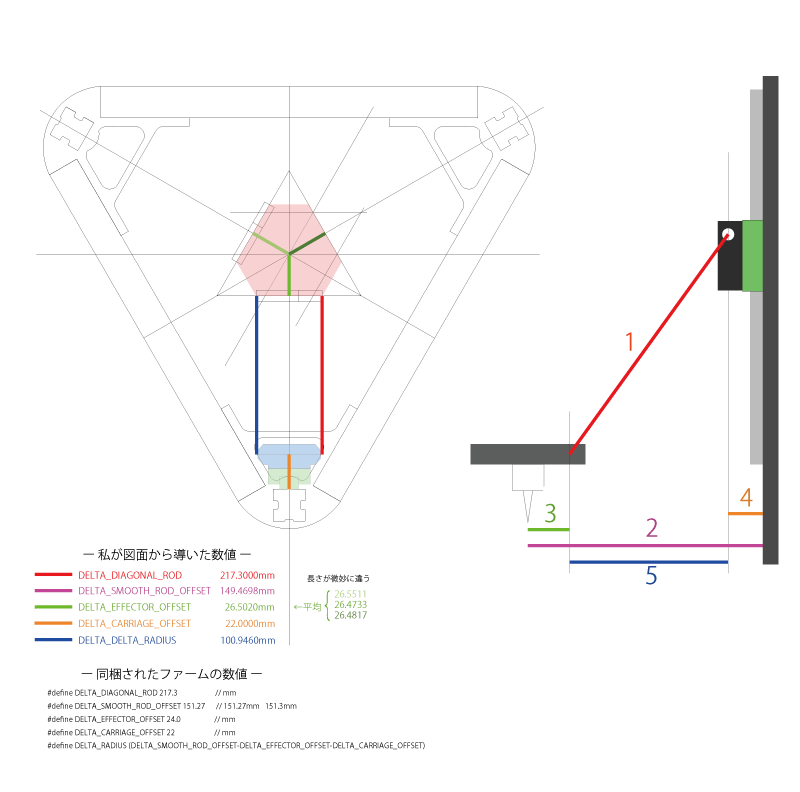
・ロッドの長さを書き込む
#define DELTA_DIAGONAL_ROD 217.3 //単位 mm
・エフェクター側のロッド先端からキャリッジ側のロッド先端までの底面の長さ
#define DELTA_RADIUS 100.96 //単位 mm
・印刷可能半径(安全な範囲)
#define DELTA_PRINTABLE_RADIUS 70.0 //単位 mm
・エンドスイッチ反応位置から底面接触までの高さ。//正確な数値は後でいれるので今は多めにいれる。
#define MANUAL_Z_HOME_POS 320 //単位 mm
とりあえずこれで動かすことは出来るはず。
===================================================
先ほど定規等で適当にとは書きましたが、
実は、私はある程度現実味のある数値を
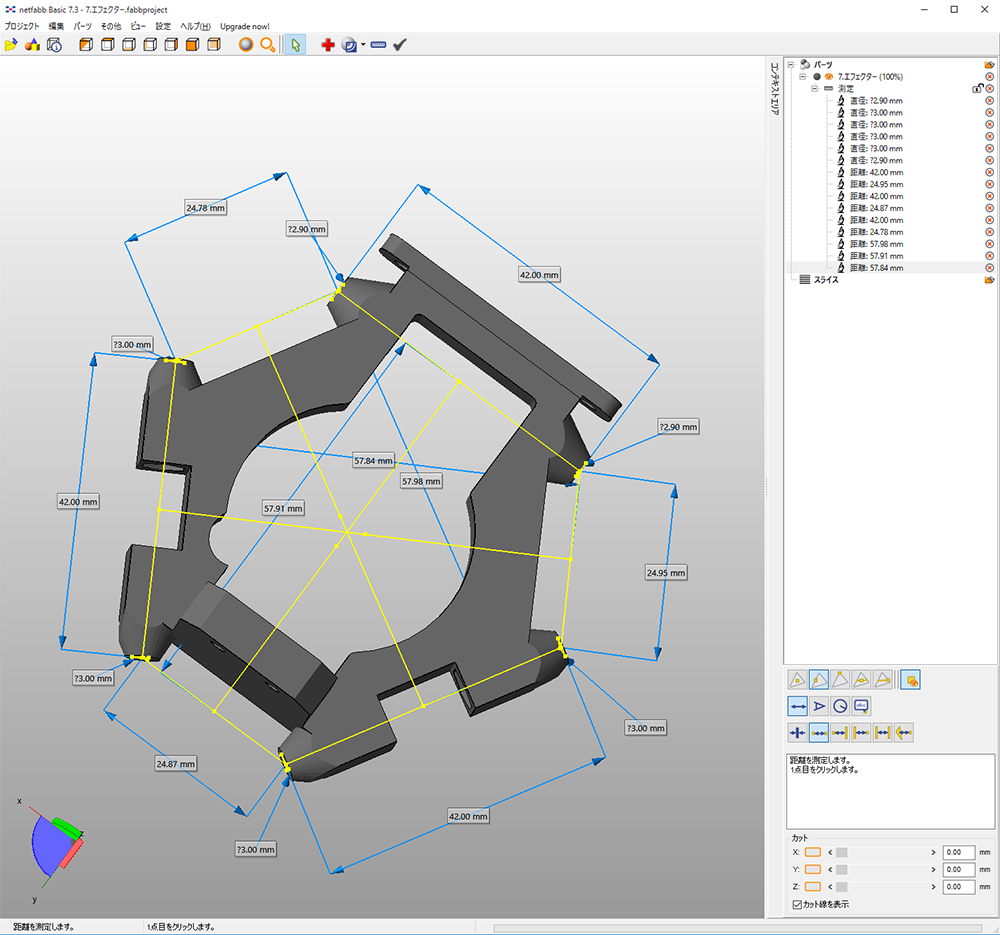
Micromakeが提供しているSTLデータから導きだしています。
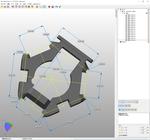
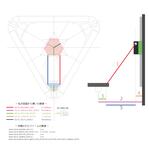
エフェクターのデータを眺めていると
面白い事にエフェクターは設計データの時点で
XYZ方向において数字にバラつきがあることが分かります。
XYZ方向全部の長さが違うので、
DELTA_RADIUSについては平均値をとりました。
===================================================
変更が終わったら、メニューバーからスケッチを選び、「マイコンボードに書き込む」を実行します。

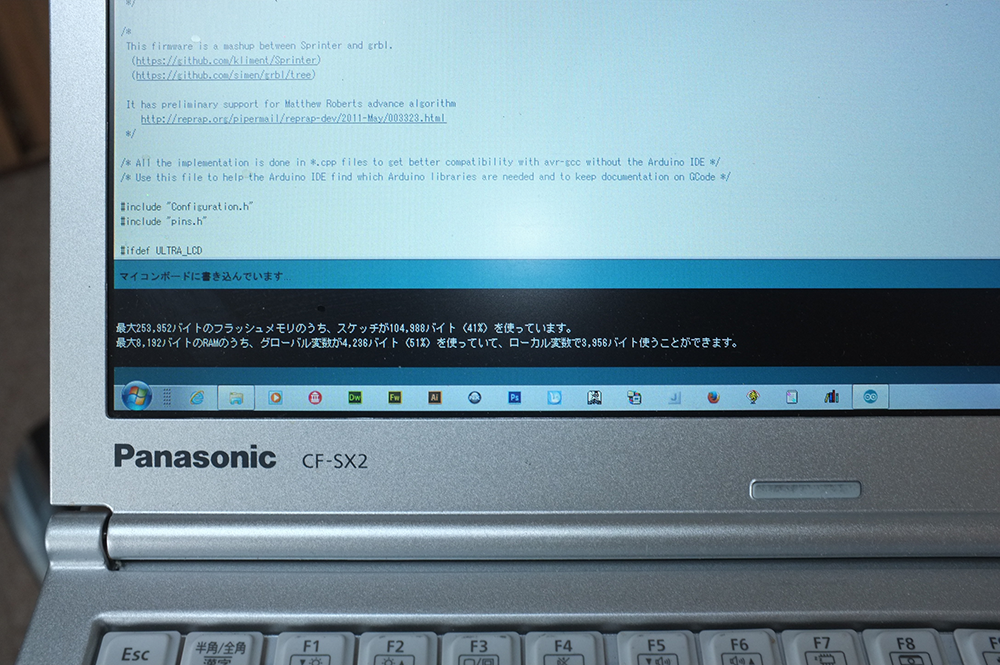
コンパイルが始まり、ボードへの書き込み、本体の再起動まで自動で行われます。
「マイコンボードへの書き込みが完了しました」と出るまで何もやることがありません。

(コンパイルエラーが出た場合、全角スペースを使ったりしてませんか?
半角スペースに統一してみると直る場合があります。)
これでKossel K800はテスト用に動くようになりました。
ツールメニューからファイルを選び、その中の「保存」を押します。
あとはArduino IDE統合環境を閉じて終わらせます。
調整の流れとしましては、Repetier-Hostで微量の動作をさせて数値を見つけ出し
その数値をArduino IDE統合環境で焼き、またRepetier-Hostでデータを取るの繰り返しになります。
調整は気の長い勝負になるので、
とりあえず覚悟だけして今日はこれまでにします。
ではまた。
Kossel K800はArduinoにMarlinというファームウェアを
焼き付けることで動くようになっています。
そのファームウェアにボディの細かい数値を入れ込んで
初めて正確な印刷が出来る様になるのですが、
部品の工作精度が甘いので仕様表の値をそのまま当てはめてもまともに動きません。
しかも0.1mm精度の工作機械に対し定規やノギス、メジャーで計るには無理があります。
そこで実際に機械を動かして調整していくことになるわけですね。
まず動かすために間違い覚悟(定規などで適当に測ったもの)の数値情報を
Arduinoに焼き付けることにします。
Marlinのソースファイルは同梱されていたSDメモリに入っていました。
「kossel mini heated bed.zip」
という圧縮ファイルです。解凍すると
kossel mini heated bed -------ArduinoAddons フォルダ
|
---Marlin フォルダ
|
---.gitignore
|
---README.md
という形で展開されます。肝心のソースファイルはMarlinフォルダに格納されていました。
Marlin.inoというファイルがMarlinフォルダに入っているので実行してみます。
すると、先日インストールしたArduino IDE統合環境が起動し
関連のソースファイルを全部読み上げてくれます。
タブの中の「Configuration.h」をクリックします。
ここに書かれている内容にパラメータ情報がちりばめられています。
ここを変更しArduinoに焼き付けることでファームウェアの設定変更になります。
まずは、以下の数値を書き換えちゃいます。
順番や場所は様々なので、目視で見つけられない場合は検索機能を使うことにします。
・通信速度を設定する
#define BAUDRATE 250000 //Winでは250000で大抵動くようです。LINUXではエラーになるらしい。
・マザーボードの種類
#define MOTHERBOARD 33 //33番はRAMPS1.4(Power outputs: Extruder, Fan, Bed)
・ロッドの長さを書き込む
#define DELTA_DIAGONAL_ROD 217.3 //単位 mm
・エフェクター側のロッド先端からキャリッジ側のロッド先端までの底面の長さ
#define DELTA_RADIUS 100.96 //単位 mm
・印刷可能半径(安全な範囲)
#define DELTA_PRINTABLE_RADIUS 70.0 //単位 mm
・エンドスイッチ反応位置から底面接触までの高さ。//正確な数値は後でいれるので今は多めにいれる。
#define MANUAL_Z_HOME_POS 320 //単位 mm
とりあえずこれで動かすことは出来るはず。
===================================================
先ほど定規等で適当にとは書きましたが、
実は、私はある程度現実味のある数値を
Micromakeが提供しているSTLデータから導きだしています。
エフェクターのデータを眺めていると
面白い事にエフェクターは設計データの時点で
XYZ方向において数字にバラつきがあることが分かります。
XYZ方向全部の長さが違うので、
DELTA_RADIUSについては平均値をとりました。
===================================================
変更が終わったら、メニューバーからスケッチを選び、「マイコンボードに書き込む」を実行します。
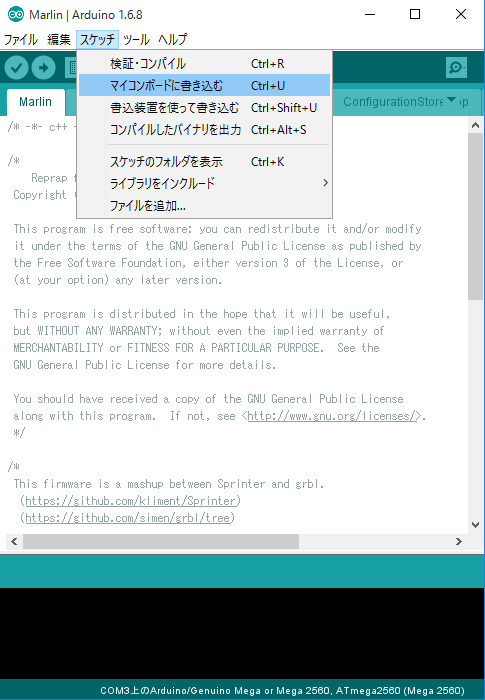
コンパイルが始まり、ボードへの書き込み、本体の再起動まで自動で行われます。
「マイコンボードへの書き込みが完了しました」と出るまで何もやることがありません。
(コンパイルエラーが出た場合、全角スペースを使ったりしてませんか?
半角スペースに統一してみると直る場合があります。)
これでKossel K800はテスト用に動くようになりました。
ツールメニューからファイルを選び、その中の「保存」を押します。
あとはArduino IDE統合環境を閉じて終わらせます。
調整の流れとしましては、Repetier-Hostで微量の動作をさせて数値を見つけ出し
その数値をArduino IDE統合環境で焼き、またRepetier-Hostでデータを取るの繰り返しになります。
調整は気の長い勝負になるので、
とりあえず覚悟だけして今日はこれまでにします。
ではまた。
 2016.05.06 23:05
|
2016.05.06 23:05
| 


トラックバックURL
トラックバック一覧





