3D-PRT9)エクストルーダーを作る
2016.04.02
今日はエクストルーダーの作成です。
難しい事はないので、サクサクいっちゃいます。
<モーター>
ギア 1個
<モーター固定>
M3x8mm 3本
<ベアリング固定具>
M4x8mm 1本
M4ワッシャー 1個
<ベアリング固定具とベースフレームの接続>
M3x20mm 1本
<圧力調整ネジ>
M3バタフライナット 1個
M3X40mm 1本
スプリング 1個
M3六角ナット 1個
<本体とエクストルーダーの接続>
M4x10mm 2本
M4四角ナット 2個
パーツを並べてみました。なんてシンプルな構造・・

まずベアリングを固定具に取り付けます。

M4ワッシャーとM4x8mmネジを取り出して、
ベアリングをワッシャーで押しつける様に取り付けます。

ネジ先をナットで締めるわけじゃ無くプラ軸だけで支えるので
あまり力入れると割れそうです。程ほどのところでやめておきます。
常に動く箇所なので、錆びては大変です。
できれば付属の物を使わないで錆びないネジに変えた方がいいでしょう。

ベアリングの取り付け完了。正味1分です。
次はモーターにギアを取り付けます。
X,Y,Z軸のモーターと同じ要領なので悩むところは無くあっさり。
例のごとく、付ける深さは後で調整するので適当です。

今度はモーターをエクストルーダーのフレームに取り付けます。

ネジはM3x8mmを3本です。
4つ穴がありますが、写真の部分は留めないでおきます。

先ほど作ったベアリング固定具をフレームにあてがって、

先ほど留めなかった穴にベアリング固定具もろとも貫通させて留めます。
使用ネジはM3x20mm 1本。
余り締めすぎると後々つけるバネの効果が無くなるので少し緩くしておきます。

次は、調整ネジを付ける前に、それを支えるナットを入れ込みます。

写真が見にくいかもしれませんが、
指の影にM3の六角ナットがギリギリ入るスペースが隠されています。
バネを取り出します。


そのバネにM3バタフライナットとM3X40mm 1本
を通し写真の様に組み上げます。
付属のものは、なぜかネジとバタフライナットが2セットありました。

そのままエクストルーダーのフレームに差し込み、

ネジを締めていきます。

バネの程よい力でフィラメントを挟み込みスリップさせない機構のようです。
締め具合で圧を調整するようになっているので、今の段階はゆるめにしておきます。
(とはいっても、バネ力がもっとも弱い状態でも指で開くのは困難でした)
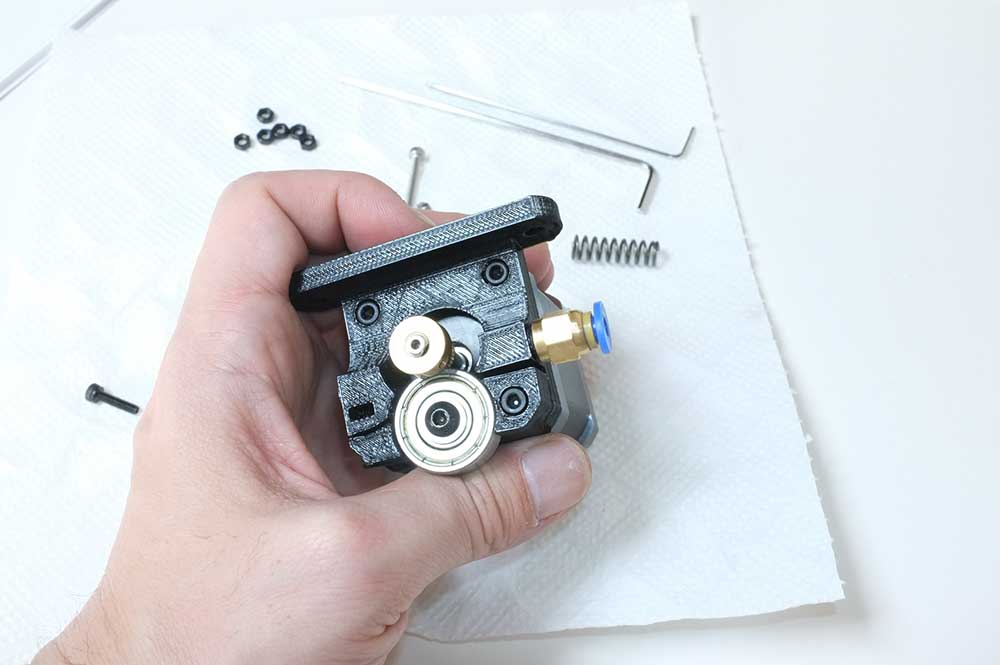
次はワンタッチ継ぎ手を横に付けて

見た目は完成。

次はフィラメントが正常に引っ張れるように、調整を行います。
オマケで付いてきたフィラメントを実際に通してみるとわかりやすいのですが、
管の入り口から、出口までの直線に対して、
モーターのギアとベアリングが噛み合うように位置を調整します。

写真を見てもらえれば雰囲気を感じとってもらえるのでは無いでしょうか。

調整が終われば、エクストルーダーの完成です。
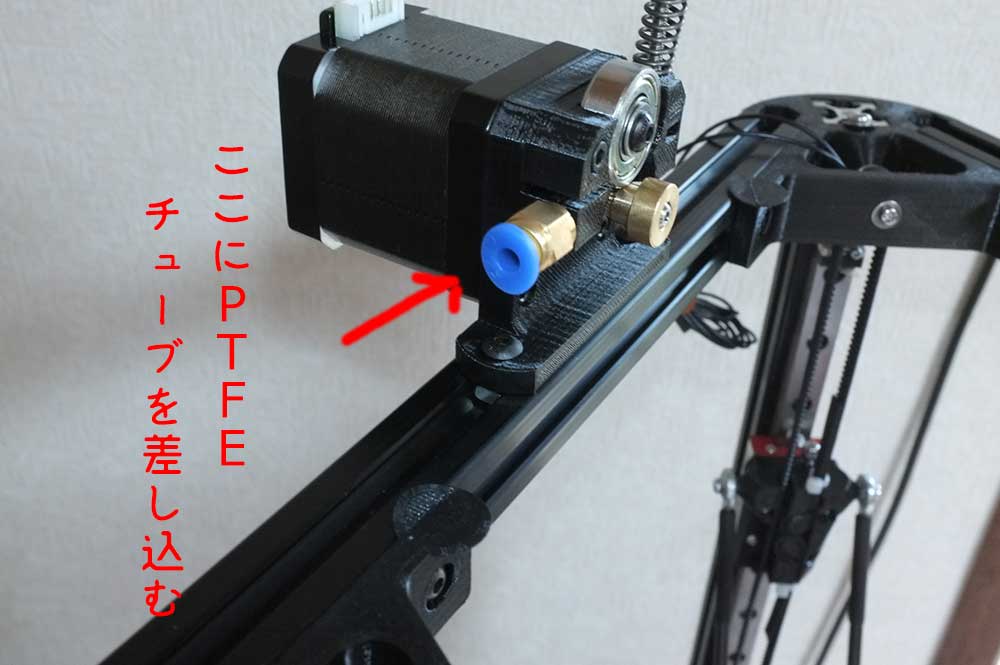
では完成したエクストルーダーを本体フレームに付けてみます。
PTFEチューブと固定用ネジ、ナットを取り出します。
M4ネジx10mm 2本(付属説明書では8mmと書いてましたが間違いです)
M4四角ナット 2個
で取り付けます。
取り付け位置は後から自由に変えられる仕様なので、
今は適当にくっつけます。
このとき私は上部フレームに付けました。

PTFEチューブはフィラメントをホットエンドまで送り込むガイドの役割を果たします。
このチューブの先端はペンチでちぎったかの様に潰れていました。
これではフィラメントが詰まってしまいますね。
よろしくないので、潰れた先端をカッターでカットします。
(両端が潰れていたので両方カットです。)

ワンタッチ仕様なので、奥まで差し込むだけで繋がります。

ホットエンド側にも差し込み完成。便利ですね、ワンタッチ継ぎ手。

機械系はこれで完了です。
残りは電気系ですね。
配線周りはマニュアル通りに接続する前に、
元々のRAMPS1.4やArduinoの配線図等と照らし合わせて
間違いが無いか確認してから行いたいと思います。
なぜならネットで先人の経験談を見ると、
配線ミスで基板を結構焼いている方がいらっしゃるみたいですので・・・・
電圧チェックもありますので、
精度の高いテスターも用意しないといけませんね。
それではまた。
難しい事はないので、サクサクいっちゃいます。
<モーター>
ギア 1個
<モーター固定>
M3x8mm 3本
<ベアリング固定具>
M4x8mm 1本
M4ワッシャー 1個
<ベアリング固定具とベースフレームの接続>
M3x20mm 1本
<圧力調整ネジ>
M3バタフライナット 1個
M3X40mm 1本
スプリング 1個
M3六角ナット 1個
<本体とエクストルーダーの接続>
M4x10mm 2本
M4四角ナット 2個
パーツを並べてみました。なんてシンプルな構造・・

まずベアリングを固定具に取り付けます。

M4ワッシャーとM4x8mmネジを取り出して、
ベアリングをワッシャーで押しつける様に取り付けます。

ネジ先をナットで締めるわけじゃ無くプラ軸だけで支えるので
あまり力入れると割れそうです。程ほどのところでやめておきます。
常に動く箇所なので、錆びては大変です。
できれば付属の物を使わないで錆びないネジに変えた方がいいでしょう。

ベアリングの取り付け完了。正味1分です。
次はモーターにギアを取り付けます。
X,Y,Z軸のモーターと同じ要領なので悩むところは無くあっさり。
例のごとく、付ける深さは後で調整するので適当です。

今度はモーターをエクストルーダーのフレームに取り付けます。

ネジはM3x8mmを3本です。
4つ穴がありますが、写真の部分は留めないでおきます。

先ほど作ったベアリング固定具をフレームにあてがって、

先ほど留めなかった穴にベアリング固定具もろとも貫通させて留めます。
使用ネジはM3x20mm 1本。
余り締めすぎると後々つけるバネの効果が無くなるので少し緩くしておきます。

次は、調整ネジを付ける前に、それを支えるナットを入れ込みます。

写真が見にくいかもしれませんが、
指の影にM3の六角ナットがギリギリ入るスペースが隠されています。
バネを取り出します。


そのバネにM3バタフライナットとM3X40mm 1本
を通し写真の様に組み上げます。
付属のものは、なぜかネジとバタフライナットが2セットありました。

そのままエクストルーダーのフレームに差し込み、

ネジを締めていきます。

バネの程よい力でフィラメントを挟み込みスリップさせない機構のようです。
締め具合で圧を調整するようになっているので、今の段階はゆるめにしておきます。
(とはいっても、バネ力がもっとも弱い状態でも指で開くのは困難でした)
次はワンタッチ継ぎ手を横に付けて

見た目は完成。
次はフィラメントが正常に引っ張れるように、調整を行います。
オマケで付いてきたフィラメントを実際に通してみるとわかりやすいのですが、
管の入り口から、出口までの直線に対して、
モーターのギアとベアリングが噛み合うように位置を調整します。

写真を見てもらえれば雰囲気を感じとってもらえるのでは無いでしょうか。

調整が終われば、エクストルーダーの完成です。

では完成したエクストルーダーを本体フレームに付けてみます。
PTFEチューブと固定用ネジ、ナットを取り出します。
M4ネジx10mm 2本(付属説明書では8mmと書いてましたが間違いです)
M4四角ナット 2個
で取り付けます。
取り付け位置は後から自由に変えられる仕様なので、
今は適当にくっつけます。
このとき私は上部フレームに付けました。

PTFEチューブはフィラメントをホットエンドまで送り込むガイドの役割を果たします。
このチューブの先端はペンチでちぎったかの様に潰れていました。
これではフィラメントが詰まってしまいますね。
よろしくないので、潰れた先端をカッターでカットします。
(両端が潰れていたので両方カットです。)
ワンタッチ仕様なので、奥まで差し込むだけで繋がります。

ホットエンド側にも差し込み完成。便利ですね、ワンタッチ継ぎ手。

機械系はこれで完了です。
残りは電気系ですね。
配線周りはマニュアル通りに接続する前に、
元々のRAMPS1.4やArduinoの配線図等と照らし合わせて
間違いが無いか確認してから行いたいと思います。
なぜならネットで先人の経験談を見ると、
配線ミスで基板を結構焼いている方がいらっしゃるみたいですので・・・・
電圧チェックもありますので、
精度の高いテスターも用意しないといけませんね。
それではまた。
 2016.04.02 23:14
|
2016.04.02 23:14
| 







