3D-PRT23)歪み調整3
2016.07.26
最近疲れてます。やること多すぎです。体調悪いですorz
ダイヤルゲージでベッドの高さがはじき出されたら、
その値に合わせて適当な物をを挟んだりして
ベッドの高さを細かく調整すれば
Z0の座標では水平を維持できる。と言う話があります。
これはもっともな話で、とても簡単ではっきりと効果がでる方法だと思います。
しかし、しっかりフレームを作っていれば
ベッドは水平を保っているはずなのです。
それが出来ていないと言うことは、
柱やボトムフレームの組み立てに歪みがあるという事です。
作り方に問題が無いとしたら、部品そのものが歪んでいるのかもしれません。
その歪みの根本が分からないまま物を挟んで水平を出すと、
柱はベッドに対して垂直を維持できてないハズなので
高さのあるものを造形したときに問題が出てくる可能性があります。
そこで私は、フレームの歪みを出来るだけ少なくする努力をしてから
物を挟んで水平を出すことに決めました。
その方がやり遂げた感が強くて楽しいですしね。
では、折角ダイヤルゲージがあるのですから、

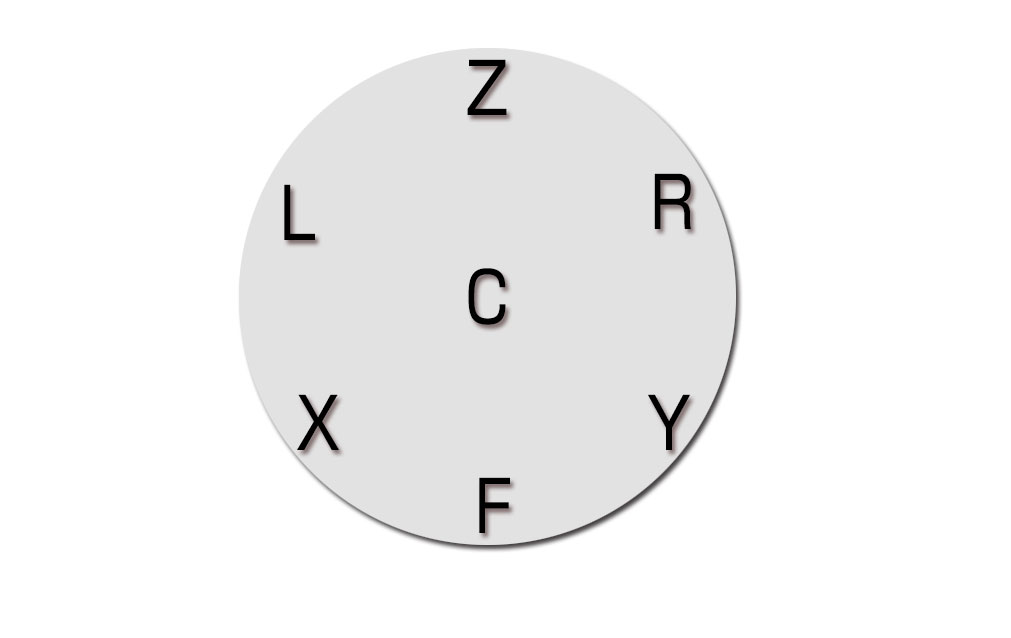
X・Y・Z・L・R・F + 中央
の7箇所について高さを調べてみたいと思います。
Radius 103.5 高さ305で計測
中央 1.34
Z 1.34
Y 1.34
X 1.34
R 1.10
F 1.16
L 1.40
ZYXが一致するのはキャリッジのネジを回して調整したため当然です。
しかし、RFLとの差がでていて、Lにおいては極端に違っているというのが更におかしい。
こんな事ってあり得るんですね・・
考え方を変えてみると、RFの2つが他の4カ所と違っている様にも見えます。
当初の四角形を印刷したときに1つの角が90度にならない問題は
少なからずここに原因がありそうです。
ベッドをネジ止めで固定しているのですが、
その圧力でネジの無いところにしわ寄せが来ている、そんなこともあるかもしれません。
う~ん
ダイヤルゲージを疑うわけでは無いのですが、
念には念をということで、数字が正しいのかを確認するために
何度か同じ測定をしてみましょう。
( ゚д゚) ・・・
(つд⊂)ゴシゴシ
(;゚д゚) ・・・
(つд⊂)ゴシゴシゴシ
_, ._
(;゚ Д゚) …!?
中央の値が毎回違う・・・・
ホームに戻し、エンドスイッチから下に降ろすだけの簡単なお仕事。
なのに、毎回高さが違うというのはなんで?(乾笑)
厚紙で隙間をチェックするだけでは全くわかりませんでした。
かれこれ10回以上は計測しましたが、振れ幅は-0.3~+0.3位のズレが起きます。
高さが安定しないと言うことは、
調整の根底が崩れてしまうので、造形の歪み問題は二の次になります。
困りましたね。
さて、まず何から手を付けていきましょうかね。
・
・
・
・
・
・
・
・
暫く考えて・・・
ダイヤルゲージの精度は0.1mmレベルで狂うことはまずあり得ないと思います。
製品マニュアルを見ると、全測定範囲指示誤差が16μmと書かれているので
mmに直すと0.016mm、0を基準に考えると±0.008mmというところでしょうか。
この値を信用するならば、やはり本体側に問題がある可能性が高いです。
何度か計測して分かってきましたが、
デコピンをするように(もちろん軽くですよ)エフェクターを弾いたあと、
測定すると値は大幅に狂います。
ということはどこかに遊びがあって、それが悪さをしている気がしてきました。
ちょっと対策に苦労しそうですね。
測定結果が毎回変わる理由を素人ながらに考えると、
可動部分が濃厚だと思います。
XYZの軸フレーム - リニアスライダー - エンドストップ
- プーリー - ベルト - キャリッジ - ロッドエンド
これらのどれかだと推測。
基本パーツの殆どですね ヽ(∀゚ )人( ゚∀)ノ ヒャッハー
仕方ありません、根本から見直しましょう。
まず軸フレームからです。
=======================================================
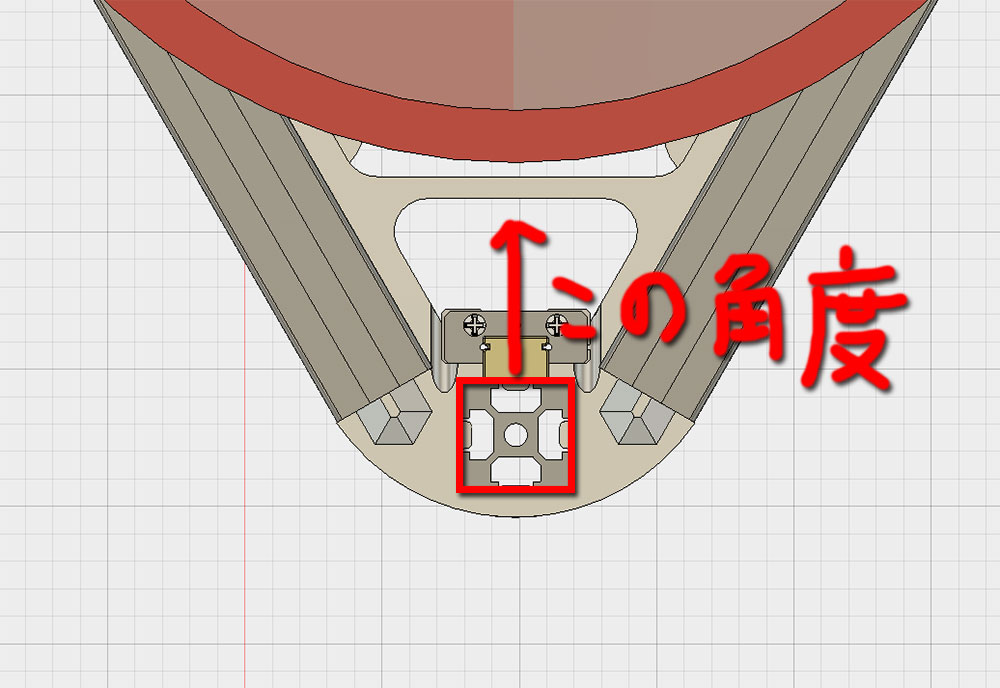
当初の問題が出たときにその原因と解決方法を考えていたのですが、
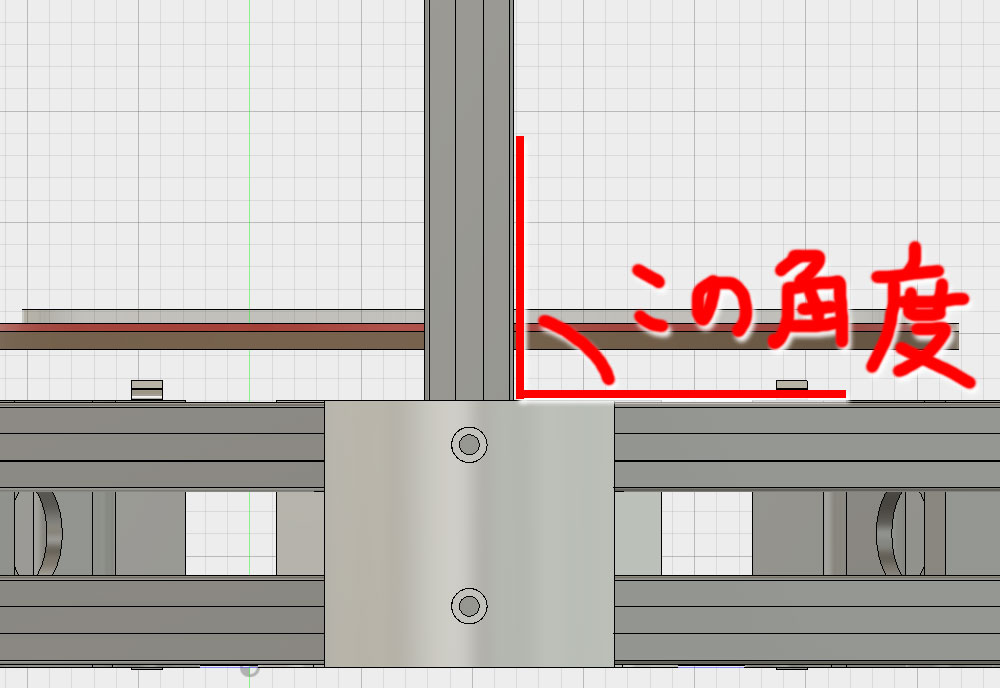
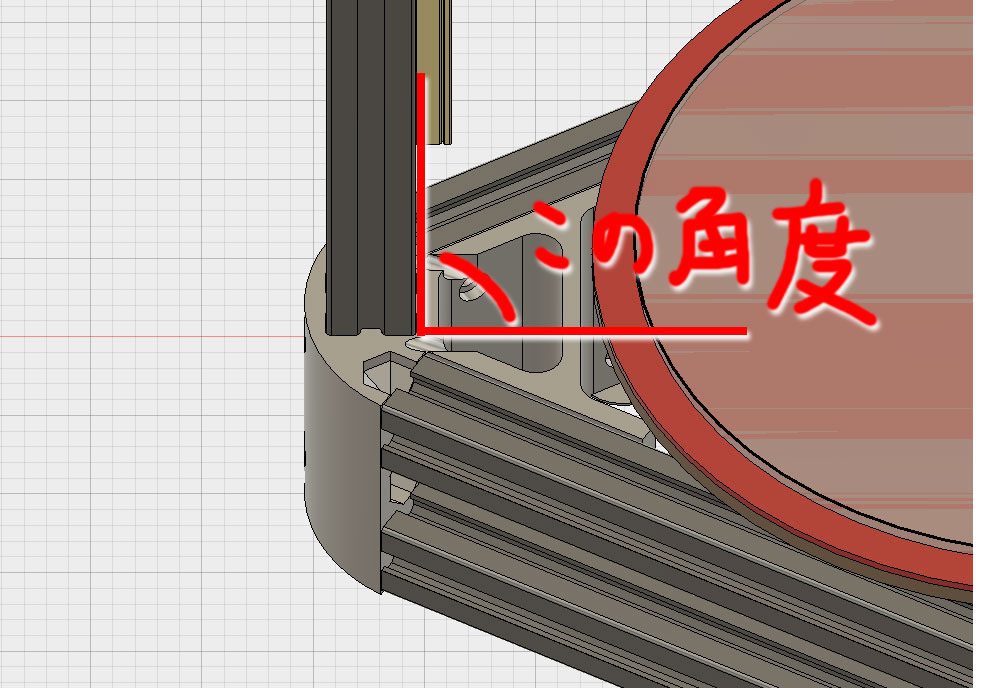
そのうちの一つに軸フレームが正確な角度になっていない為じゃないかと思いつきました。
図で言うとこの角度です。

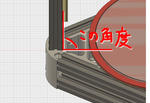
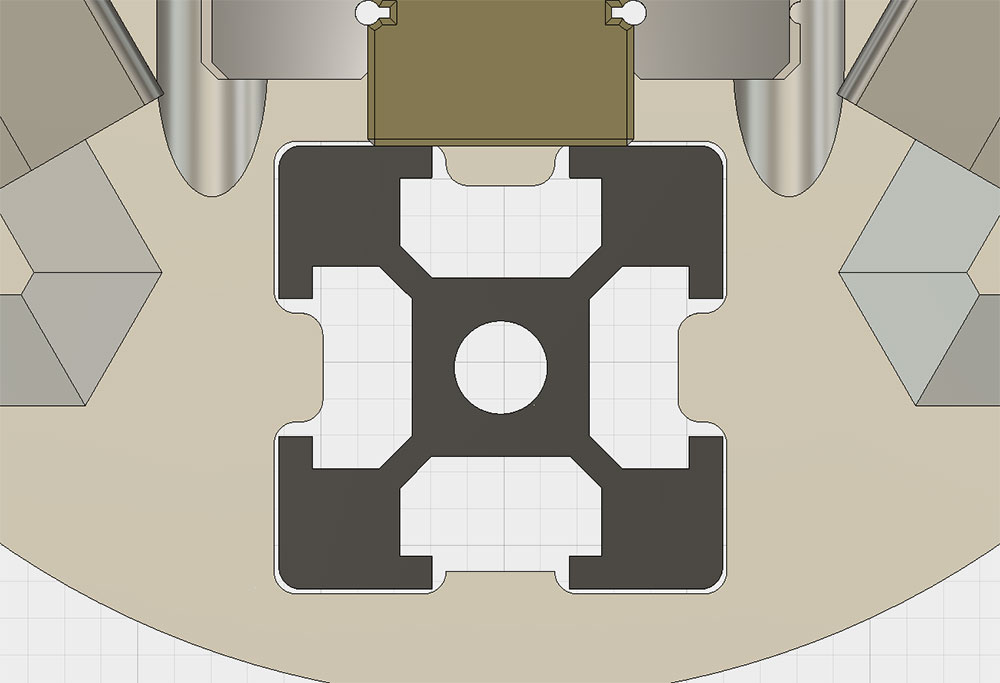
そもそもコーナーパーツとアルミフレームとの間には隙間が設けられています。
↓画像を拡大して見て下さい。
コーナーパーツの精度のばらつきを吸収するためだとは思いますが、
隙間があるということは、歪んで取り付けられてしまう事も当然あり得るわけです。
私のKosselは3Dプリンターで印刷された物なので、この隙間が正確にあるかも妖しいです。
まずこの不安要素を取り払います。
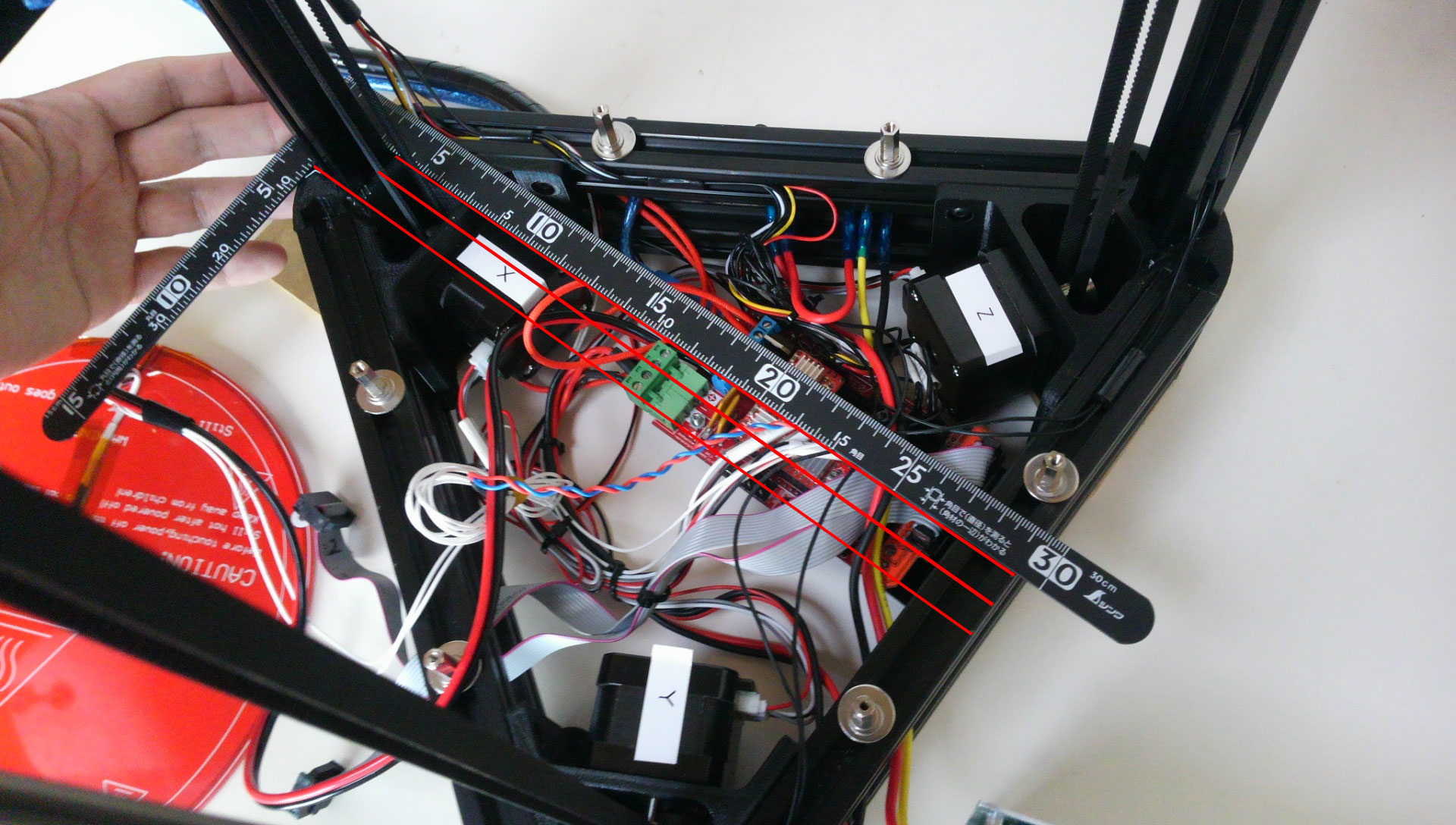
高精度な計測器が無いので、差し金でチェック。
まずはアルミフレームの捻りからチェック。
柱に差し金の内角をあて、対するアルミフレームの中央位置と比べて見る。
ずれていたら角度が合っていない。
↓こんな感じに角度を調べてみます。

結果、X,Y,Z軸全てが狂っていました。特にX軸については1センチ近く中央からそれていました。
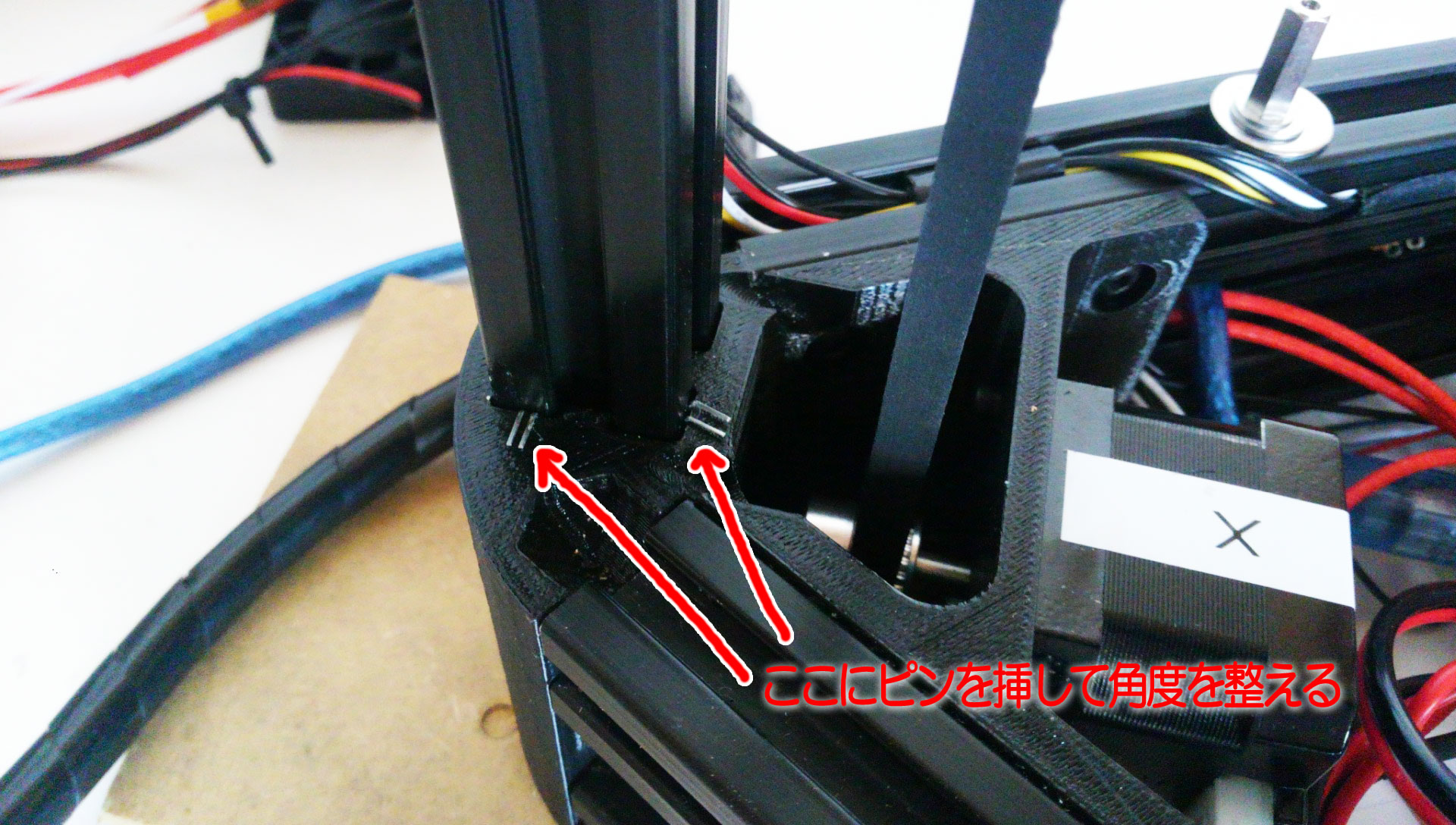
それぞれを正常な位置に角度調整しようと試みますが、固定するネジを締めると狂った角度に固定されます。
これはコーナーパーツの穴が歪んでいるんでしょうね・・
強制的に角度調整するために、隙間に薄く細い金属を差し込んで対処することにします。
私は、ホチキスの針を差し込むことにしました。

これでバッチリ。調整に時間が掛かりましたが、
ネジを締めても狂い無くキッチリ合いました。
ついでに、トップコーナーの高さも木を使って均等にしておきます。

=======================================================
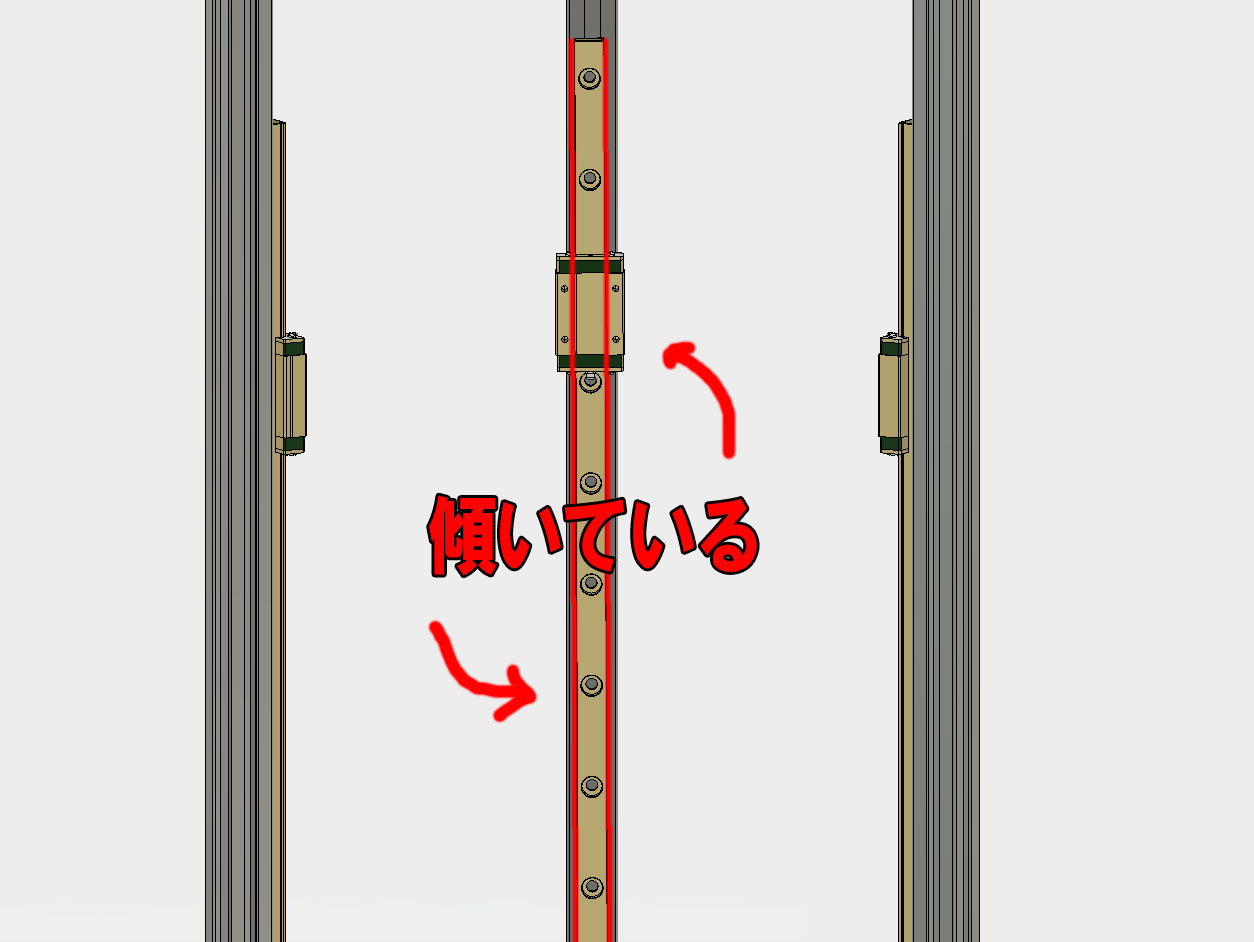
次はリニアスライダーにメスを入れます。
リニアスライダーはアルミフレームに固定されていますが、
M4ナットがキツキツで入るために、
斜めに固定されるなんてことは疑ってもみませんでした。
ですが実際測ってみると結構狂っているのでした。
こんな状況↓ですね。
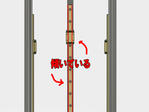
ちょっと見にくいですがわかりますでしょうか?
両端では1mm近く傾いている軸もありました。
これを正確に取り付けることにします。
リニアスライダーは幅12mm。アルミフレームは20mm、その差は8mmです。
ということはアルミフレームの外枠から4mmの位置に
リニアスライダーを固定する必要があります。しかも平行に。
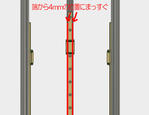
ノギスで4mmを測りながらねじ止めするのは困難です。
私は4mm角の角材をホムセンで買ってきて高さを均等にしました。
角材を利用すればリニアスライダーとアルミフレームは正確な並行関係になるはずです。
3軸とも正確に修正して次にいきます。
=======================================================
さて、次ですが、
ベルトやプーリーも気になっていることがありまして、原因追求と改善を考えていました。
その、気になっていることとは異音と振動です。
ホームからZ0に移動する時など、縦に大きく移動したときに起きる現象なんですが、
ベルトがブルルンと微振動する瞬間があるんです。音もビィィィィッィンと高周波っぽい音がしますし、
何かに干渉しているのは明確です。
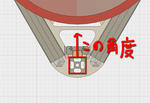
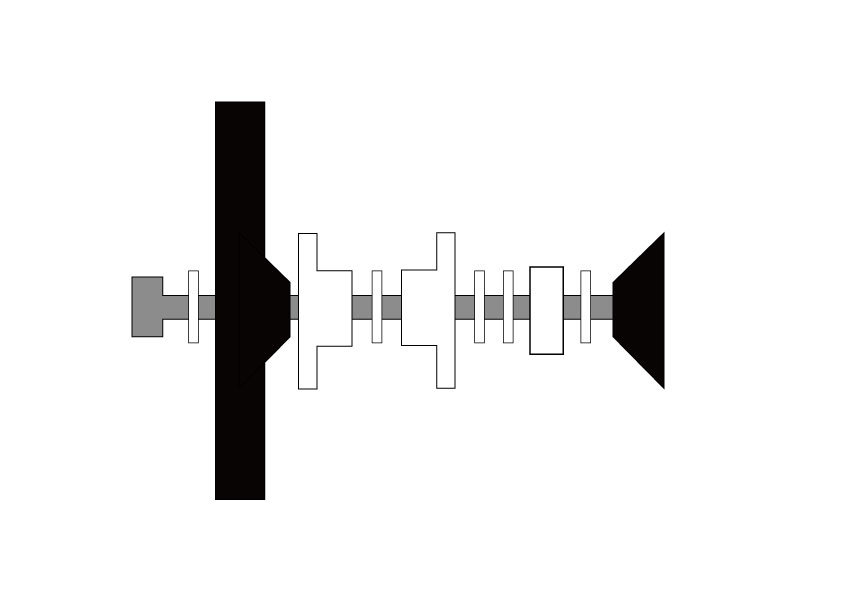
0.1mm刻みで、ホームポジションから最底面へ動かしてみたところ、
ベルトがプーリーの縁に乗り上がる瞬間があることが分かりました。
わかりやすく極端な例で図を描きます。

ベルトが赤線のように変形というか歪んでいるんです。
キャリッジが中央にいるときはそれほどプーリーやギア位置に緊張はないのですが、
上、または下に寄った時は、キャリッジの厚みでぐいぐいベルトを押しまくるので、
ベルトがプーリーの縁に乗り、ベルトに緊張状態が起きるのです。
これも脱調の一種なんでしょうか。
三角コーナーを作成するときにトップとボトムを比べて同じ位置に調整した事がありましたが、
結局はキャリッジも交えて調整しないと意味なかったわけです。
ガッカリダヨ!
まずキャリッジ部分のベルトの位置を定規等でで測ります。

この幅が上位置でも下位置でも同じなるようにプーリーとギアを調整していきます。
まずボトムコーナー内のモーターギアですが
こちらは簡単。六角レンチで芋ねじを緩め、

ギアの位置をベルトが定規の位置になるように動かし固定します。
次にトップコーナーのプーリーを調整。
プーリーは製作途中の時点で
幅に余裕を持たせるつもりで、結構端に寄せていたのですが、
それが仇となりました
今回の調整ではその余裕を取り払います。


最終的に↑写真のように組み上げました。
最後にキャリッジを手で動かして、ベルトが歪まないか確認して終了。
この調整を行った後は、変な高周波音や振動はなくなり、妙な座標ずれも軽減しました。
=======================================================
次はエンドストップに手を入れます。
毎度ホームポジションからZ0までの高さが違うということは、
エンドストップの反応にばらつきがある可能性が非常に高いです。
そこで何かミスがあるのは無いかとか、改善のための工夫はないかと考えてみます。
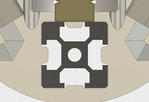
使用しているエンドストップは板バネタイプで、
その板をキャリッジのネジで押し込むことで反応しています。
その板バネはテコ原理でスイッチを押すという仕組みをとっており。
板バネの弾力具合によって押すタイミングが変わってしまう気がしてなりません。
なぜ板バネを押す仕様にしてるのかを考えた時に、
「スイッチへの激突を緩和するため」
が頭を横切りました。ほかには思いつきません。
ネット情報を集めてみたのですが、
余程の速度でホームに移動させないと上記のことは起きないという話です。
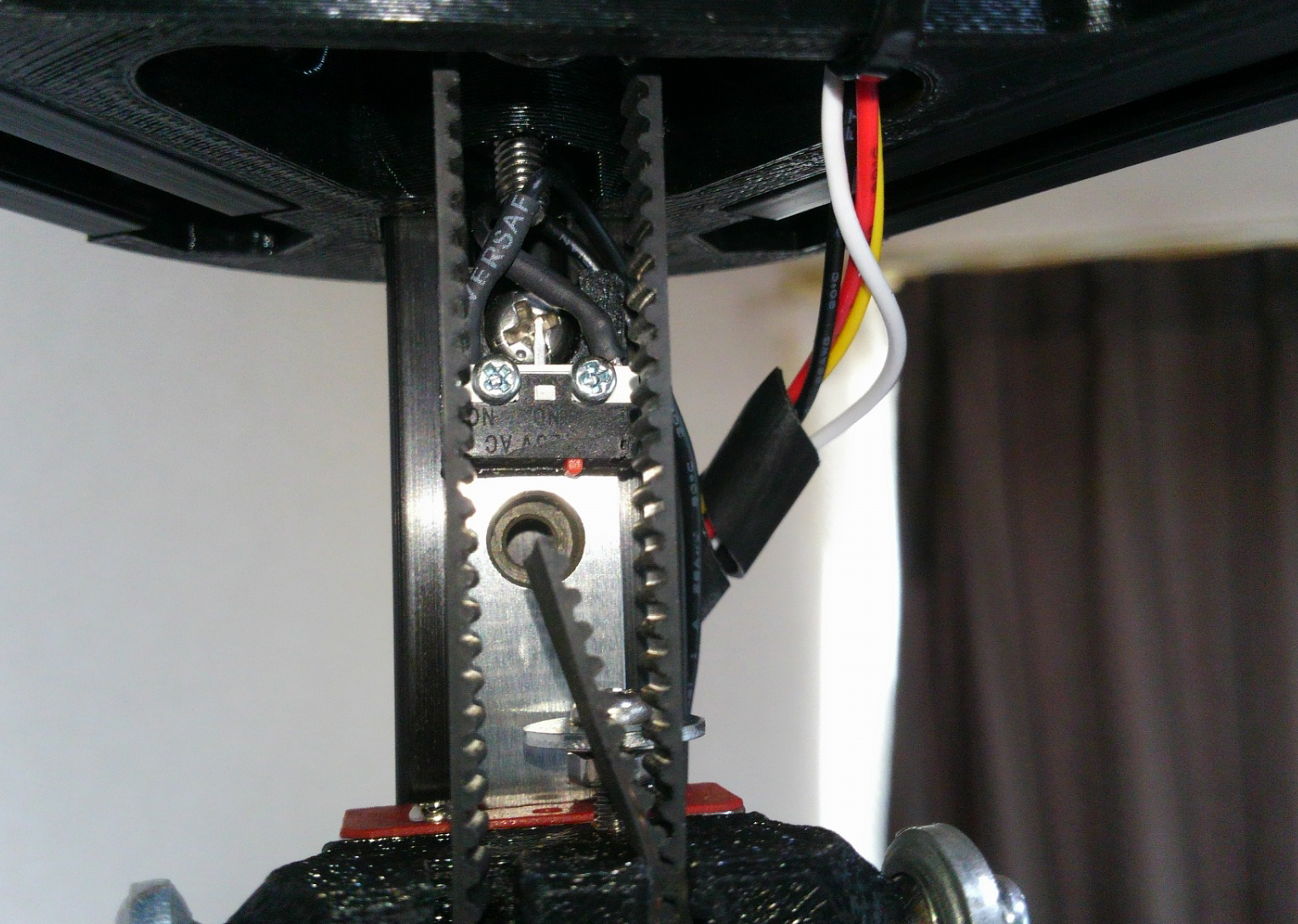
それじゃ板を極力活用しない形で遊びを減らして取り付けしてみました。
簡単に言うとスイッチをひっくり返して取り付けました。
しかもバネを取り払い、直に押すようにしました。
画像はとても見にくいですがこんな感じです↓

加工前

加工後
エンドストップの赤い部分が実際に押すスイッチなのですが、
この部分だけでも結構遊びがあるんですよね。
板バネがなくても、それほど心配ないのかなと・・。
ま、試してみないとわかりませんけどね。
バネがなくなることで、エンドストップと留め具との間に在った
M2ワッシャーを噛ませる必要もなくなり、直に取り付けることが可能になりました。
さらにファームウェアで、ホームポジションへ戻るときの速度を少し遅くしてみました。
何度かホーム移動を実験させましたが、
あくまで目視での評価ですが、
スイッチの反応が遅れ、遊びを飛び越えてエンドストップに激突!
なんてことはないように見えます。
一応、光学エンドストップも購入済みなのです。(3個で150円くらいでした。)
この方法で問題が発覚した場合には、後々、光学エンドストップに変えたいと思います。
=======================================================
次はベルトですね。
ベルトはいろいろ試行錯誤しているときに、
ロッド固定ネジで傷つけてしまっている箇所がいくつかあります。
ついでなので、ベルトも交換してしまいます。
切れ目に近いくらいの損傷なので、今のところは精度に影響なかったとしても、
後々破断に繋がっては危険極まりないので、その意味でも交換です。
=======================================================
キャリッジは今のところ手を入れられる部分がありません。
気になる事はあるんですが、今の段階ではどうにもならないので、
いったんスルーします。
=======================================================
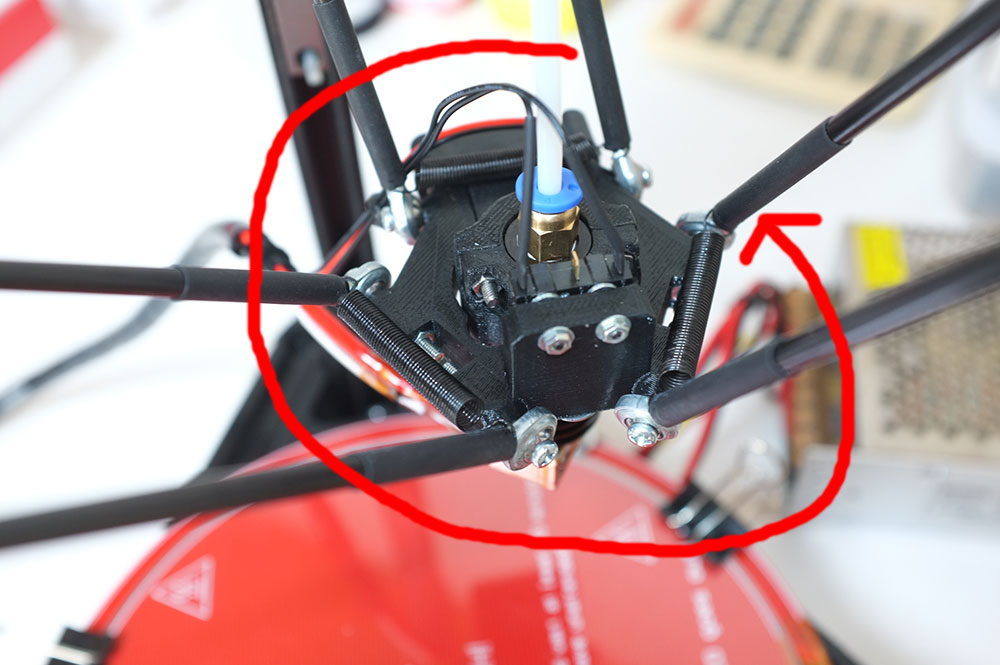
最後にロッドエンドです。
ある程度Kosselの構造が分かってきた上でじっくり観察すると、
中華感漂う作りで実にチープです。
隙間が多すぎてカタカタ動くものもあれば、きっちり隙間なく滑らかに動くのもあります。
一番の原因はこれのような気がしてきました。
気になったら吉日。新しいロッドエンド+カーボンロッドを注文します。
大体1週間くらいで届きましたが、
届いたものはカーボンロッドにロッドエンドが接着されてた形で、4本/6本が使えない状況でした。(固定してあるのに、長さが均等じゃないし・・・)
その時のチェック動画がこれ。
この動画を販売元に送りましたところ、
あっさり「新しいの送るアルヨ!」と返事が・・
「ちゃんと精査してね!、ついでにカーボンロッドとロッドエンドを接着しないでね!」
と言ってみました、
待つことさらに1週間。
送られてきましたよ。新しいのが。
でもね、歪みや遊びが無いのは18個/24個 (゜ロ゜;)
結局、最初に送られてきた接着されてあるロッドを
ヒートガンで温め、使えるロッドエンドを取り外し、
新しく送られてきたものと合算で24個/24個を作りました。
最終的には国産のロッドエンドに変えなきゃいけないでしょうね。
中華パーツみたいに気軽に買えるような金額ではないでしょうが・・・
=======================================================
ついでにモータードライバーもA4988からDRV8825に交換します。
(本音は静音化で話題沸騰のTMC2100が欲しかったのですがちょっと高いですね。)
DRV8825にすることでどれだけ差が出るかわかりませんが、
ステップ数を従来の物より1/2にできるので
少しは座標移動の誤差が緩和されるかななんて甘い期待を・・・(;´・ω・)
ま、希望通りの性能アップを発揮してくれなかったとしても、
熱耐性はA4988よりあるという話ですので、損にはなりません。
ま1個130円くらいの部品ですし・・・
DRV8825とA4988は、電圧ボリュームの位置が逆になっています。
迂闊に同じ向きにつけてしまうと壊してしまうので注意。
背面に足の役割が書かれていますので、方向をしっかり把握してから差し替えます。
DRV8825の計算式は
電流I=電圧V/(5x抵抗Ω)
で導かれます。
届いたDRV8825は0.1Ωの抵抗を積んでいました。
座標軸用を1A、エクストルーダー用を1.2Aにしたいので、
設定電圧は0.5Vと0.6Vということになります。
それらをいつものようにテスタで調べながら調整っと。
あと、ファームウェアの変更も忘れてはいけません。
ステップ数がA4988では1/16だったのですが、DRV8825は1/32になります。
より精細になるわけですね。
XYZ_MICROSTEPS 16 ⇒ XYZ_MICROSTEPS 32
=======================================================
さて、ここまでやってどうでしょうかね・・・
実験結果は、次回に。
ダイヤルゲージでベッドの高さがはじき出されたら、
その値に合わせて適当な物をを挟んだりして
ベッドの高さを細かく調整すれば
Z0の座標では水平を維持できる。と言う話があります。
これはもっともな話で、とても簡単ではっきりと効果がでる方法だと思います。
しかし、しっかりフレームを作っていれば
ベッドは水平を保っているはずなのです。
それが出来ていないと言うことは、
柱やボトムフレームの組み立てに歪みがあるという事です。
作り方に問題が無いとしたら、部品そのものが歪んでいるのかもしれません。
その歪みの根本が分からないまま物を挟んで水平を出すと、
柱はベッドに対して垂直を維持できてないハズなので
高さのあるものを造形したときに問題が出てくる可能性があります。
そこで私は、フレームの歪みを出来るだけ少なくする努力をしてから
物を挟んで水平を出すことに決めました。
その方がやり遂げた感が強くて楽しいですしね。
では、折角ダイヤルゲージがあるのですから、
X・Y・Z・L・R・F + 中央
の7箇所について高さを調べてみたいと思います。
Radius 103.5 高さ305で計測
中央 1.34
Z 1.34
Y 1.34
X 1.34
R 1.10
F 1.16
L 1.40
ZYXが一致するのはキャリッジのネジを回して調整したため当然です。
しかし、RFLとの差がでていて、Lにおいては極端に違っているというのが更におかしい。
こんな事ってあり得るんですね・・
考え方を変えてみると、RFの2つが他の4カ所と違っている様にも見えます。
当初の四角形を印刷したときに1つの角が90度にならない問題は
少なからずここに原因がありそうです。
ベッドをネジ止めで固定しているのですが、
その圧力でネジの無いところにしわ寄せが来ている、そんなこともあるかもしれません。
う~ん
ダイヤルゲージを疑うわけでは無いのですが、
念には念をということで、数字が正しいのかを確認するために
何度か同じ測定をしてみましょう。
( ゚д゚) ・・・
(つд⊂)ゴシゴシ
(;゚д゚) ・・・
(つд⊂)ゴシゴシゴシ
_, ._
(;゚ Д゚) …!?
中央の値が毎回違う・・・・
ホームに戻し、エンドスイッチから下に降ろすだけの簡単なお仕事。
なのに、毎回高さが違うというのはなんで?(乾笑)
厚紙で隙間をチェックするだけでは全くわかりませんでした。
かれこれ10回以上は計測しましたが、振れ幅は-0.3~+0.3位のズレが起きます。
高さが安定しないと言うことは、
調整の根底が崩れてしまうので、造形の歪み問題は二の次になります。
困りましたね。
さて、まず何から手を付けていきましょうかね。
・
・
・
・
・
・
・
・
暫く考えて・・・
ダイヤルゲージの精度は0.1mmレベルで狂うことはまずあり得ないと思います。
製品マニュアルを見ると、全測定範囲指示誤差が16μmと書かれているので
mmに直すと0.016mm、0を基準に考えると±0.008mmというところでしょうか。
この値を信用するならば、やはり本体側に問題がある可能性が高いです。
何度か計測して分かってきましたが、
デコピンをするように(もちろん軽くですよ)エフェクターを弾いたあと、
測定すると値は大幅に狂います。
ということはどこかに遊びがあって、それが悪さをしている気がしてきました。
ちょっと対策に苦労しそうですね。
測定結果が毎回変わる理由を素人ながらに考えると、
可動部分が濃厚だと思います。
XYZの軸フレーム - リニアスライダー - エンドストップ
- プーリー - ベルト - キャリッジ - ロッドエンド
これらのどれかだと推測。
基本パーツの殆どですね ヽ(∀゚ )人( ゚∀)ノ ヒャッハー
仕方ありません、根本から見直しましょう。
まず軸フレームからです。
=======================================================
当初の問題が出たときにその原因と解決方法を考えていたのですが、
そのうちの一つに軸フレームが正確な角度になっていない為じゃないかと思いつきました。
図で言うとこの角度です。
そもそもコーナーパーツとアルミフレームとの間には隙間が設けられています。
↓画像を拡大して見て下さい。
コーナーパーツの精度のばらつきを吸収するためだとは思いますが、
隙間があるということは、歪んで取り付けられてしまう事も当然あり得るわけです。
私のKosselは3Dプリンターで印刷された物なので、この隙間が正確にあるかも妖しいです。
まずこの不安要素を取り払います。
高精度な計測器が無いので、差し金でチェック。
まずはアルミフレームの捻りからチェック。
柱に差し金の内角をあて、対するアルミフレームの中央位置と比べて見る。
ずれていたら角度が合っていない。
↓こんな感じに角度を調べてみます。
結果、X,Y,Z軸全てが狂っていました。特にX軸については1センチ近く中央からそれていました。
それぞれを正常な位置に角度調整しようと試みますが、固定するネジを締めると狂った角度に固定されます。
これはコーナーパーツの穴が歪んでいるんでしょうね・・
強制的に角度調整するために、隙間に薄く細い金属を差し込んで対処することにします。
私は、ホチキスの針を差し込むことにしました。
これでバッチリ。調整に時間が掛かりましたが、
ネジを締めても狂い無くキッチリ合いました。
ついでに、トップコーナーの高さも木を使って均等にしておきます。

=======================================================
次はリニアスライダーにメスを入れます。
リニアスライダーはアルミフレームに固定されていますが、
M4ナットがキツキツで入るために、
斜めに固定されるなんてことは疑ってもみませんでした。
ですが実際測ってみると結構狂っているのでした。
こんな状況↓ですね。
ちょっと見にくいですがわかりますでしょうか?
両端では1mm近く傾いている軸もありました。
これを正確に取り付けることにします。
リニアスライダーは幅12mm。アルミフレームは20mm、その差は8mmです。
ということはアルミフレームの外枠から4mmの位置に
リニアスライダーを固定する必要があります。しかも平行に。

ノギスで4mmを測りながらねじ止めするのは困難です。
私は4mm角の角材をホムセンで買ってきて高さを均等にしました。
角材を利用すればリニアスライダーとアルミフレームは正確な並行関係になるはずです。
3軸とも正確に修正して次にいきます。
=======================================================
さて、次ですが、
ベルトやプーリーも気になっていることがありまして、原因追求と改善を考えていました。
その、気になっていることとは異音と振動です。
ホームからZ0に移動する時など、縦に大きく移動したときに起きる現象なんですが、
ベルトがブルルンと微振動する瞬間があるんです。音もビィィィィッィンと高周波っぽい音がしますし、
何かに干渉しているのは明確です。
0.1mm刻みで、ホームポジションから最底面へ動かしてみたところ、
ベルトがプーリーの縁に乗り上がる瞬間があることが分かりました。
わかりやすく極端な例で図を描きます。

ベルトが赤線のように変形というか歪んでいるんです。
キャリッジが中央にいるときはそれほどプーリーやギア位置に緊張はないのですが、
上、または下に寄った時は、キャリッジの厚みでぐいぐいベルトを押しまくるので、
ベルトがプーリーの縁に乗り、ベルトに緊張状態が起きるのです。
これも脱調の一種なんでしょうか。
三角コーナーを作成するときにトップとボトムを比べて同じ位置に調整した事がありましたが、
結局はキャリッジも交えて調整しないと意味なかったわけです。
ガッカリダヨ!
まずキャリッジ部分のベルトの位置を定規等でで測ります。

この幅が上位置でも下位置でも同じなるようにプーリーとギアを調整していきます。
まずボトムコーナー内のモーターギアですが
こちらは簡単。六角レンチで芋ねじを緩め、

ギアの位置をベルトが定規の位置になるように動かし固定します。
次にトップコーナーのプーリーを調整。
プーリーは製作途中の時点で
幅に余裕を持たせるつもりで、結構端に寄せていたのですが、
それが仇となりました
今回の調整ではその余裕を取り払います。

最終的に↑写真のように組み上げました。
最後にキャリッジを手で動かして、ベルトが歪まないか確認して終了。
この調整を行った後は、変な高周波音や振動はなくなり、妙な座標ずれも軽減しました。
=======================================================
次はエンドストップに手を入れます。
毎度ホームポジションからZ0までの高さが違うということは、
エンドストップの反応にばらつきがある可能性が非常に高いです。
そこで何かミスがあるのは無いかとか、改善のための工夫はないかと考えてみます。
使用しているエンドストップは板バネタイプで、
その板をキャリッジのネジで押し込むことで反応しています。
その板バネはテコ原理でスイッチを押すという仕組みをとっており。
板バネの弾力具合によって押すタイミングが変わってしまう気がしてなりません。
なぜ板バネを押す仕様にしてるのかを考えた時に、
「スイッチへの激突を緩和するため」
が頭を横切りました。ほかには思いつきません。
ネット情報を集めてみたのですが、
余程の速度でホームに移動させないと上記のことは起きないという話です。
それじゃ板を極力活用しない形で遊びを減らして取り付けしてみました。
簡単に言うとスイッチをひっくり返して取り付けました。
しかもバネを取り払い、直に押すようにしました。
画像はとても見にくいですがこんな感じです↓

加工前
加工後
エンドストップの赤い部分が実際に押すスイッチなのですが、
この部分だけでも結構遊びがあるんですよね。
板バネがなくても、それほど心配ないのかなと・・。
ま、試してみないとわかりませんけどね。
バネがなくなることで、エンドストップと留め具との間に在った
M2ワッシャーを噛ませる必要もなくなり、直に取り付けることが可能になりました。
さらにファームウェアで、ホームポジションへ戻るときの速度を少し遅くしてみました。
何度かホーム移動を実験させましたが、
あくまで目視での評価ですが、
スイッチの反応が遅れ、遊びを飛び越えてエンドストップに激突!
なんてことはないように見えます。
一応、光学エンドストップも購入済みなのです。(3個で150円くらいでした。)
この方法で問題が発覚した場合には、後々、光学エンドストップに変えたいと思います。
=======================================================
次はベルトですね。
ベルトはいろいろ試行錯誤しているときに、
ロッド固定ネジで傷つけてしまっている箇所がいくつかあります。
ついでなので、ベルトも交換してしまいます。
切れ目に近いくらいの損傷なので、今のところは精度に影響なかったとしても、
後々破断に繋がっては危険極まりないので、その意味でも交換です。
=======================================================
キャリッジは今のところ手を入れられる部分がありません。
気になる事はあるんですが、今の段階ではどうにもならないので、
いったんスルーします。
=======================================================
最後にロッドエンドです。
ある程度Kosselの構造が分かってきた上でじっくり観察すると、
中華感漂う作りで実にチープです。
隙間が多すぎてカタカタ動くものもあれば、きっちり隙間なく滑らかに動くのもあります。
一番の原因はこれのような気がしてきました。
気になったら吉日。新しいロッドエンド+カーボンロッドを注文します。
大体1週間くらいで届きましたが、
届いたものはカーボンロッドにロッドエンドが接着されてた形で、4本/6本が使えない状況でした。(固定してあるのに、長さが均等じゃないし・・・)
その時のチェック動画がこれ。
この動画を販売元に送りましたところ、
あっさり「新しいの送るアルヨ!」と返事が・・
「ちゃんと精査してね!、ついでにカーボンロッドとロッドエンドを接着しないでね!」
と言ってみました、
待つことさらに1週間。
送られてきましたよ。新しいのが。
でもね、歪みや遊びが無いのは18個/24個 (゜ロ゜;)
結局、最初に送られてきた接着されてあるロッドを
ヒートガンで温め、使えるロッドエンドを取り外し、
新しく送られてきたものと合算で24個/24個を作りました。
最終的には国産のロッドエンドに変えなきゃいけないでしょうね。
中華パーツみたいに気軽に買えるような金額ではないでしょうが・・・
=======================================================
ついでにモータードライバーもA4988からDRV8825に交換します。
(本音は静音化で話題沸騰のTMC2100が欲しかったのですがちょっと高いですね。)
DRV8825にすることでどれだけ差が出るかわかりませんが、
ステップ数を従来の物より1/2にできるので
少しは座標移動の誤差が緩和されるかななんて甘い期待を・・・(;´・ω・)
ま、希望通りの性能アップを発揮してくれなかったとしても、
熱耐性はA4988よりあるという話ですので、損にはなりません。
ま1個130円くらいの部品ですし・・・
DRV8825とA4988は、電圧ボリュームの位置が逆になっています。
迂闊に同じ向きにつけてしまうと壊してしまうので注意。
背面に足の役割が書かれていますので、方向をしっかり把握してから差し替えます。
DRV8825の計算式は
電流I=電圧V/(5x抵抗Ω)
で導かれます。
届いたDRV8825は0.1Ωの抵抗を積んでいました。
座標軸用を1A、エクストルーダー用を1.2Aにしたいので、
設定電圧は0.5Vと0.6Vということになります。
それらをいつものようにテスタで調べながら調整っと。
あと、ファームウェアの変更も忘れてはいけません。
ステップ数がA4988では1/16だったのですが、DRV8825は1/32になります。
より精細になるわけですね。
XYZ_MICROSTEPS 16 ⇒ XYZ_MICROSTEPS 32
=======================================================
さて、ここまでやってどうでしょうかね・・・
実験結果は、次回に。
 2016.07.26 00:10
|
2016.07.26 00:10
| 


3D-PRT22)歪み調整2
2016.06.17
最近多忙につきKosselに触れられない日々が続いております。
前回は大まかな歪みを補正する事に成功しましたが、
まだ完全ではありませんでした。
さてさて、どう解決するかです。
まず原因がどこにあるのかを限定しなくてはいけません。
そこでまず行ったのが、エフェクターをロッドごと左回転に1つシフトする方法です。

X軸のキャリッジに接続していたロッドをY軸のキャリッジに、
Z軸のキャリッジに接続していたロッドをX軸のキャリッジに、
Y軸のキャリッジに接続していたロッドをZ軸のキャリッジに接続します。
この状態でテスト印刷してみます。
これで何が分かるかというと、
1.エフェクター+ホットエンド+ロッド
2.フレーム+リニアスライダー+キャリッジ+ベッド+エンドストップ+ベルト関連
3.ソフト系+電気系(モーター等)
原因が沢山あってそれらが複合で起きている場合を除き、
この3種類で1番に原因があるかどうかを判別することができます。
なぜか?、それはエフェクターやロッドが原因であれば、
歪みの位置は微量たりとも変化するはずだからです。
で、やってみた結果を言いますと、
印刷物の歪み具合は全く変わっていません。
ということは原因は2番か3番と言うことになります。
次にベッド(ヒートベッド+ガラス)を左に120度回転させて固定します。

これを行いまた印刷してみます。
フィラメントの消費はこの際無視しましょう(笑)
さて、結果はどうでしょうか・・
なにも変わりません(笑)
ということは
2番についてはフレーム、リニアスライダー、キャリッジ、エンドストップ、ベルト関連
この5つに絞れたわけです。
エンドストップについては、以前から気になっていたのですが、
1個板バネの反発が不安定な物がありました。指で押しても反応が鈍い気がします。
そこで、以前にマウスの修理で使ったマイクロスイッチが大量に余ってるのですが、
Kosselのエンドストップと偶然にも全く同じだったので3個全部交換してみました。
結果・・・・ なにも変わらずです。
ただ、ホームからZ0に移動したときの高さについては少し精度が上がった気がします。
(このホームからZ0までの高さ問題については後日書きます。)
これでフレーム、リニアスライダー、キャリッジ、ベルト関連に絞れてきました。
(この際3番のソフト系と電子系は後からじっくり考えることにします。)
ここら辺から印刷だけで原因を追及するのが難しくなっていきます。
そこでダイヤルゲージを調達することに決めました。
0.01mmの精度があればいいので「SK 小型ダイヤルゲージ DI-0542」を購入しました。
キャンペーンなのか特売なのか分かりませんが、
アマゾンさんで偶然にも1302円で買えたのでラッキーです。
これをホットエンドの代わりに装着して今後確認していきますよ。
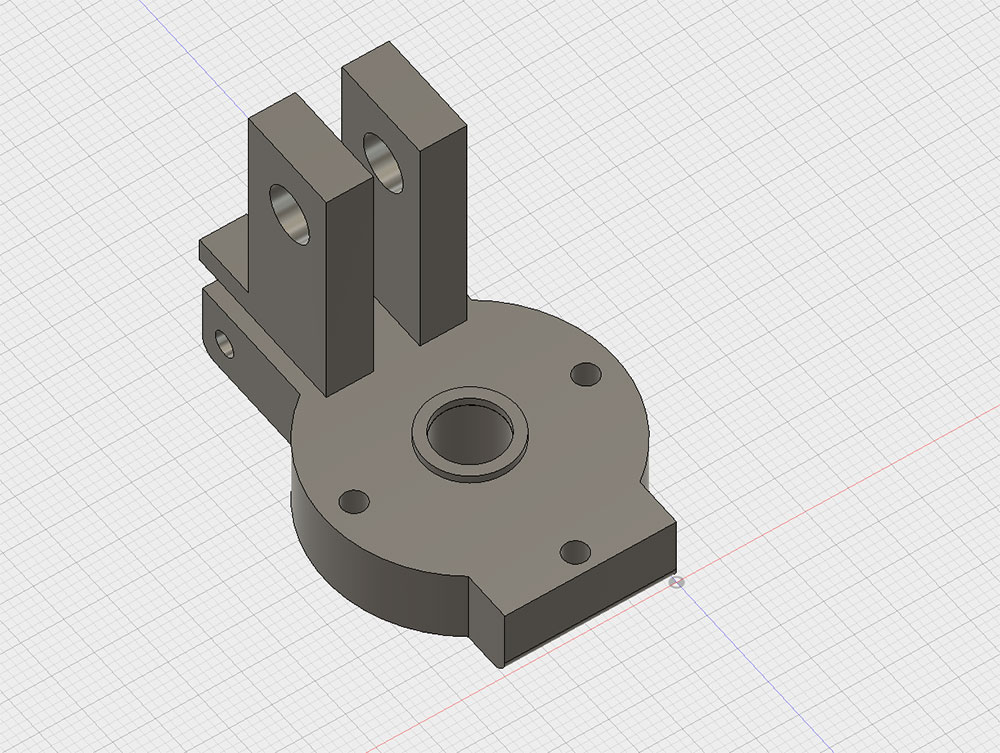
おっと、装着するためにはアタッチメントが必要ですね。
今のKossel君は部品を作るだけの精度が甘いので、
自作するには精度に影響の無い形を考えます。
ということでホットエンドを固定しているパーツと差し替える形で設計しました。

ダイヤルゲージが動かないように固定できればいいのですから、
この部分だけの作成であれば、多少歪んでいても問題ありません。
印刷して、穴周りはドリルでキレイに再整形。
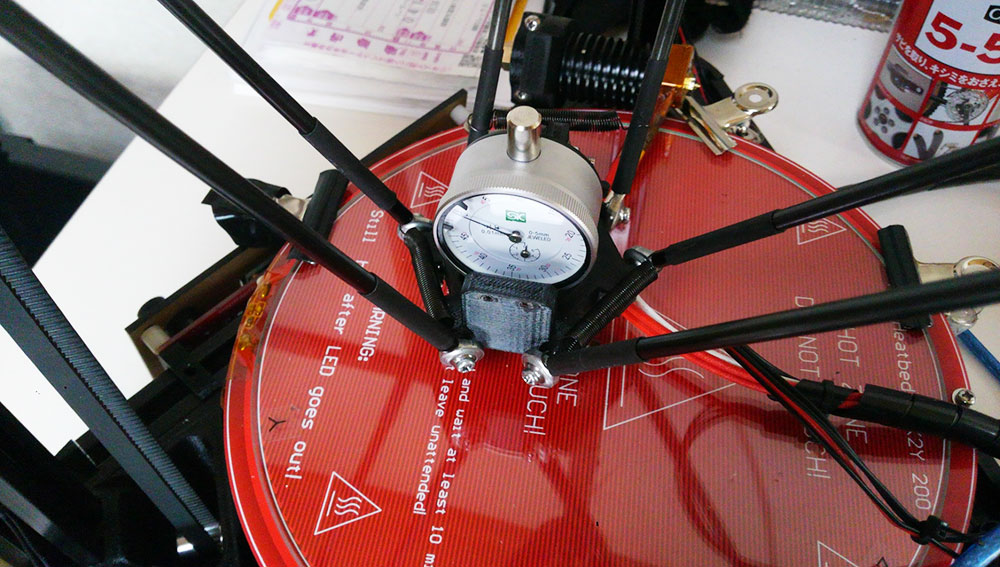
できた物をエフェクターに装着してみました。

アタッチメントがぐらつかないように、ワッシャーとネジでガッチリ固定します。
ダイヤルゲージの軸受けには傾かないように金属のリングを装着。
うん、完璧。
ではダイヤルゲージを装着します。

ジャキーーン!
ファンを固定する部分が、ゲージの影になってしまいますが、
斜めからのぞき込めばさほど問題はありません。
数値はプラスもあればマイナスもあり得ます。
ゲージは1cmまで深さを測れるので、
3mm押し込んだ状態を0とするようにファームウェアの高さを調整しました。
ではいざチェックらゴー。
( ´゚д゚`)えぇーーー
なんじゃこらーー
新たな問題発覚です。
(どんな問題かは文中に書いてますが・・・)
詳しいことは次回に。
前回は大まかな歪みを補正する事に成功しましたが、
まだ完全ではありませんでした。
さてさて、どう解決するかです。
まず原因がどこにあるのかを限定しなくてはいけません。
そこでまず行ったのが、エフェクターをロッドごと左回転に1つシフトする方法です。
X軸のキャリッジに接続していたロッドをY軸のキャリッジに、
Z軸のキャリッジに接続していたロッドをX軸のキャリッジに、
Y軸のキャリッジに接続していたロッドをZ軸のキャリッジに接続します。
この状態でテスト印刷してみます。
これで何が分かるかというと、
1.エフェクター+ホットエンド+ロッド
2.フレーム+リニアスライダー+キャリッジ+ベッド+エンドストップ+ベルト関連
3.ソフト系+電気系(モーター等)
原因が沢山あってそれらが複合で起きている場合を除き、
この3種類で1番に原因があるかどうかを判別することができます。
なぜか?、それはエフェクターやロッドが原因であれば、
歪みの位置は微量たりとも変化するはずだからです。
で、やってみた結果を言いますと、
印刷物の歪み具合は全く変わっていません。
ということは原因は2番か3番と言うことになります。
次にベッド(ヒートベッド+ガラス)を左に120度回転させて固定します。

これを行いまた印刷してみます。
フィラメントの消費はこの際無視しましょう(笑)
さて、結果はどうでしょうか・・
なにも変わりません(笑)
ということは
2番についてはフレーム、リニアスライダー、キャリッジ、エンドストップ、ベルト関連
この5つに絞れたわけです。
エンドストップについては、以前から気になっていたのですが、
1個板バネの反発が不安定な物がありました。指で押しても反応が鈍い気がします。
そこで、以前にマウスの修理で使ったマイクロスイッチが大量に余ってるのですが、
Kosselのエンドストップと偶然にも全く同じだったので3個全部交換してみました。
結果・・・・ なにも変わらずです。
ただ、ホームからZ0に移動したときの高さについては少し精度が上がった気がします。
(このホームからZ0までの高さ問題については後日書きます。)
これでフレーム、リニアスライダー、キャリッジ、ベルト関連に絞れてきました。
(この際3番のソフト系と電子系は後からじっくり考えることにします。)
ここら辺から印刷だけで原因を追及するのが難しくなっていきます。
そこでダイヤルゲージを調達することに決めました。
0.01mmの精度があればいいので「SK 小型ダイヤルゲージ DI-0542」を購入しました。
キャンペーンなのか特売なのか分かりませんが、
アマゾンさんで偶然にも1302円で買えたのでラッキーです。
これをホットエンドの代わりに装着して今後確認していきますよ。
おっと、装着するためにはアタッチメントが必要ですね。
今のKossel君は部品を作るだけの精度が甘いので、
自作するには精度に影響の無い形を考えます。
ということでホットエンドを固定しているパーツと差し替える形で設計しました。
ダイヤルゲージが動かないように固定できればいいのですから、
この部分だけの作成であれば、多少歪んでいても問題ありません。
印刷して、穴周りはドリルでキレイに再整形。
できた物をエフェクターに装着してみました。

アタッチメントがぐらつかないように、ワッシャーとネジでガッチリ固定します。
ダイヤルゲージの軸受けには傾かないように金属のリングを装着。
うん、完璧。
ではダイヤルゲージを装着します。
ジャキーーン!
ファンを固定する部分が、ゲージの影になってしまいますが、
斜めからのぞき込めばさほど問題はありません。
数値はプラスもあればマイナスもあり得ます。
ゲージは1cmまで深さを測れるので、
3mm押し込んだ状態を0とするようにファームウェアの高さを調整しました。
ではいざチェックらゴー。
( ´゚д゚`)えぇーーー
なんじゃこらーー
新たな問題発覚です。
(どんな問題かは文中に書いてますが・・・)
詳しいことは次回に。
3D-PRT21)歪み調整1
2016.06.11
先日のテスト印刷からかなり日が経ってしまいましたね。
その間、仕事が忙しかったというのもあるのですが、
何もしていなかったわけではありません。
なにぶん3Dプリンターは初めてのチャレンジなので、
調整の方法を模索しながら弄り倒していました。
前回のテスト印刷で分かった一番の問題点は
四角形の一角が、正しい90度になっていないという事でした。

差し金で計ると2mmはスキマが出てしまってます。
しかも真っ直ぐではなく、少しカーブを描いているようにも見えますね

よくよく見ると他の角も0.5mmくらいはスキマがでているんじゃないかな?
と思えるくらいに歪みがあります。
1角が極端に歪むというのがクセ者で
ソフト的な物よりもハード的な側面を醸し出しています。
どの部品がどのように狂えば、印刷物がどのように出力されるのかが
全く分からないので1つ1つ試しては印刷を繰り返して
経験値を貯めていくしかありません。
PLAのフィラメント1巻を全てテスト印刷に使ってもいい覚悟で進めていきますよ。
まず、根本的な部分の作りを再確認してみます。
1.ロッド長さ
2.ネジの緩み
3.ベルトの緩み
4.モータードライバーの電圧
5.ガラス+ヒートベッドの傾き
まず1について確認してみました。
結論からすると、6本あるロッドのうち1本が異常でした。
ちょっと力をいれると、ロッドエンドがカーボンロッドから
スコスコ抜けます。
印刷範囲を限定する前に仕様通りの直径180mmで
動作実験しことがあるのですが、
そのときにロッドを痛めたんだと思います。
キッチリと長さが整えばもう外す必要もないので、
結局は瞬間接着剤でくっつけました(^^;
次に2ですが、
キャリッジやエフェクター周りのネジに遊びがあるかもしれないので、
そこら辺を重点に調査。
そこで発覚したのがキャリッジのロッド固定ネジの空回りでした。
キッチリ締めようと増し締めしたのはいいのですが、
空回りして止まりません。変だなと思って一度バラして確認したのですが、
どうやらキャリッジ内に埋め込んだナットまでネジが到達していない模様
結局15mmのネジではダメで、17mm位無いとナットまで噛まないことが発覚。
近場のホームセンターに17mmは売ってなかったので
20mmを切断して使用することにしました。
これでガッチリ締め直すことができました。
3のベルトの緩みですが、
これは3本ともしっかりテンションが掛かっていました。
ベルトを指で弾くと、ビ~~~ンと高周波っぽい反発力があります。
ここは問題ないようですね。逆に強すぎるのかなぁ~?
4のモータードライバーの電圧ですが、
再度計り直してみても1Vから変わってませんでした。
念のため予備のモータードライバーがあるので交換してみましたが改善なしです。
以前に電圧が高すぎて熱暴走、結果脱調したので電圧を下げたことがあるですが、
最終的に直らなかったら少しずつ上げるという事も試さなくてはいけませんね。
最後に5ですが、
今まで気になってながらも見ないふりしていた事があるので、
逃げずに再確認してみました。
それは、ヒートベッドとガラスを支えている金具(ネジ)です。
長さの精度もさることながら、たった3本で円を支えていることです。
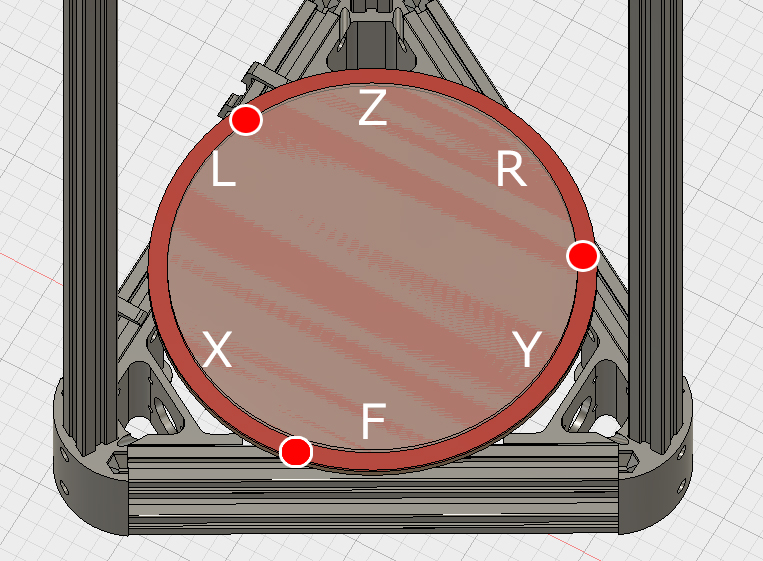
図で説明すると以下の通り。

赤マルのところがヒートベッドを固定するネジというか金具が付いています。
今までX、Y、Zの位置で厚紙によるスキマチェックをしてきましたが、
図のL、R、Fの位置でも高さを測ってみます。
すると!
X、Y、Zは高さが統一されているにもかかわらず、
LはXYZとほぼ同じで、Rはかなり低く、Fは少し低いというデータがとれました。
なるほど、印刷物の角が90度にならないのはRの位置です。
なんとなく原因が見えてきましたね。
XYZと中央の高さを整えるだけで水平がとれている物と思い込んでいました。
素人丸出しですね。
ノギスで高さを測ってみたところ、ヒートベッドの傾きを数値で確認できました。
まず水平にするにはいろんな方法があるかと思いますが、
一番いい方法は大きい一枚板を三角フレームと同型に切り、
アルミ3辺にネジ止めして固定。その上にベッドとガラスを置く事だと思いますが、
サーミスタの配線を通す穴を開けなくてはいけなかったり、
ハンダ付けしている部分を踏まない様にカットする必要があったりと
意外に敷居が高いです。
そうなると次なるベストは、3Dプリンタで台座を印刷するのがいいとなるのですが、
今は歪み問題で正確に印刷することが出来ないので、
結局は元の方法と同じで、ネジなどを用いてヒートベッドを支持するのが
簡易且つ正確なのでは無いかと思いました。
ただ、付属してきたネジやナットははノギスで計ると精度にバラツキがあり
高さを均一にすることが出来ないことが分かります。
そこで国産ネジとナットを用いることになるのですが、
今回私はスペーサーを使ってみたいと思います。
とりあえずホームセンターでM3-15mmのがあったので2セット購入

開封してノギスで計ってみると、全て15mmキッカリ!
0.01の世界でも誤差がありません。素晴らしい精度ですね。
これにナットやワッシャーを通して台座代わりにしますよ。
イメージ的にはこんな感じ。

スペーサー - M3ワッシャ - M4ワッシャ - M5ワッシャ ---- M4ワッシャ - M3ワッシャ
M5ワッシャーを入れないと、アルミフレームに対して垂直に固定することが出来ないので
結構重要です。
スペーサーとフレームの間にワッシャが3枚も挟んでいるので厚みの精度が狂うのでは?
と疑問に思いましたが、ノギスで計るとキッチリ精度が出ていたので心配ありませんでした。
それではフレームに付けて見ます。

こんなイメージで付けます。
この上からスペーサーを付けてガッチリ緩まないように固定します。
下はネジなんだから、スペーサーを付けようとしても空回りするんじゃない?
と思う人は当然いるかと思いますが、
ネジ頭のスキマに平たい棒を刺しこんでネジが摩擦で回りにくい環境を作ってあげると
ワッシャーが間に入っているおかげか、案外キツく締めることが出来るのです。
このような方法で6カ所取り付けしますよ。
完成したときの写真がこれです。

これで水平になったのか?と思いきや、
まだ詰めが甘かったのでした。
↓赤○の部分を見てみます。

↓見にくいので拡大してみます。
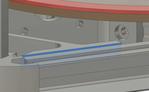
遊び部分に青く色を付けてみました。
アルミフレームをコーナーパーツに固定する際、精度の甘さを吸収するためだと思いますが、
ある程度遊びがあるので、上の図の青い部分のスキマが
各辺によって微妙に違ってしまう問題があります。

↑の図ではスキマを完全に埋めるためにアルミフレームを上に寄せた状態です。
上寄せと下寄せで最大0.6mm程の差がでます。
このスキマを各辺全て統一させる作業も水平を作るには重要なことでした。
さて、すこし疲れてきました。
ここまでやれば、ベッドの高さは水平になるよね?
そう願いながら、またテスト印刷して角度を調べてみます。
結果
4角のうち3角はほぼ隙間無しになった気がします。
極端に歪んでた1角も2mmから0.5mmまでスキマが小さくなりました。
改善はされたものの完治はしてないですね。まだ他に原因があるようです。
困ったorz
また何か対策を講じなくてはいけませんね。
ま、こんな状況でも印刷はしてみたくなる物です。
定番のルークを印刷してみましたよ。

結構キレイに印刷される物ですね。
直径が小さいのでそれほど影響が無いのでしょうか

左が0.2mm積層、右が0.1mmです。段違いで0.1mmはキレイです。

螺旋階段も0.1mmは角が立っています。
これは0.05mm印刷が可能なマエストロはどれほど綺麗な印刷になるんでしょうか・・
少し欲しくなりました・・(笑)
その間、仕事が忙しかったというのもあるのですが、
何もしていなかったわけではありません。
なにぶん3Dプリンターは初めてのチャレンジなので、
調整の方法を模索しながら弄り倒していました。
前回のテスト印刷で分かった一番の問題点は
四角形の一角が、正しい90度になっていないという事でした。

差し金で計ると2mmはスキマが出てしまってます。
しかも真っ直ぐではなく、少しカーブを描いているようにも見えますね

よくよく見ると他の角も0.5mmくらいはスキマがでているんじゃないかな?
と思えるくらいに歪みがあります。
1角が極端に歪むというのがクセ者で
ソフト的な物よりもハード的な側面を醸し出しています。
どの部品がどのように狂えば、印刷物がどのように出力されるのかが
全く分からないので1つ1つ試しては印刷を繰り返して
経験値を貯めていくしかありません。
PLAのフィラメント1巻を全てテスト印刷に使ってもいい覚悟で進めていきますよ。
まず、根本的な部分の作りを再確認してみます。
1.ロッド長さ
2.ネジの緩み
3.ベルトの緩み
4.モータードライバーの電圧
5.ガラス+ヒートベッドの傾き
まず1について確認してみました。
結論からすると、6本あるロッドのうち1本が異常でした。
ちょっと力をいれると、ロッドエンドがカーボンロッドから
スコスコ抜けます。
印刷範囲を限定する前に仕様通りの直径180mmで
動作実験しことがあるのですが、
そのときにロッドを痛めたんだと思います。
キッチリと長さが整えばもう外す必要もないので、
結局は瞬間接着剤でくっつけました(^^;
次に2ですが、
キャリッジやエフェクター周りのネジに遊びがあるかもしれないので、
そこら辺を重点に調査。
そこで発覚したのがキャリッジのロッド固定ネジの空回りでした。
キッチリ締めようと増し締めしたのはいいのですが、
空回りして止まりません。変だなと思って一度バラして確認したのですが、
どうやらキャリッジ内に埋め込んだナットまでネジが到達していない模様
結局15mmのネジではダメで、17mm位無いとナットまで噛まないことが発覚。
近場のホームセンターに17mmは売ってなかったので
20mmを切断して使用することにしました。
これでガッチリ締め直すことができました。
3のベルトの緩みですが、
これは3本ともしっかりテンションが掛かっていました。
ベルトを指で弾くと、ビ~~~ンと高周波っぽい反発力があります。
ここは問題ないようですね。逆に強すぎるのかなぁ~?
4のモータードライバーの電圧ですが、
再度計り直してみても1Vから変わってませんでした。
念のため予備のモータードライバーがあるので交換してみましたが改善なしです。
以前に電圧が高すぎて熱暴走、結果脱調したので電圧を下げたことがあるですが、
最終的に直らなかったら少しずつ上げるという事も試さなくてはいけませんね。
最後に5ですが、
今まで気になってながらも見ないふりしていた事があるので、
逃げずに再確認してみました。
それは、ヒートベッドとガラスを支えている金具(ネジ)です。
長さの精度もさることながら、たった3本で円を支えていることです。
図で説明すると以下の通り。
赤マルのところがヒートベッドを固定するネジというか金具が付いています。
今までX、Y、Zの位置で厚紙によるスキマチェックをしてきましたが、
図のL、R、Fの位置でも高さを測ってみます。
すると!
X、Y、Zは高さが統一されているにもかかわらず、
LはXYZとほぼ同じで、Rはかなり低く、Fは少し低いというデータがとれました。
なるほど、印刷物の角が90度にならないのはRの位置です。
なんとなく原因が見えてきましたね。
XYZと中央の高さを整えるだけで水平がとれている物と思い込んでいました。
素人丸出しですね。
ノギスで高さを測ってみたところ、ヒートベッドの傾きを数値で確認できました。
まず水平にするにはいろんな方法があるかと思いますが、
一番いい方法は大きい一枚板を三角フレームと同型に切り、
アルミ3辺にネジ止めして固定。その上にベッドとガラスを置く事だと思いますが、
サーミスタの配線を通す穴を開けなくてはいけなかったり、
ハンダ付けしている部分を踏まない様にカットする必要があったりと
意外に敷居が高いです。
そうなると次なるベストは、3Dプリンタで台座を印刷するのがいいとなるのですが、
今は歪み問題で正確に印刷することが出来ないので、
結局は元の方法と同じで、ネジなどを用いてヒートベッドを支持するのが
簡易且つ正確なのでは無いかと思いました。
ただ、付属してきたネジやナットははノギスで計ると精度にバラツキがあり
高さを均一にすることが出来ないことが分かります。
そこで国産ネジとナットを用いることになるのですが、
今回私はスペーサーを使ってみたいと思います。
とりあえずホームセンターでM3-15mmのがあったので2セット購入

開封してノギスで計ってみると、全て15mmキッカリ!
0.01の世界でも誤差がありません。素晴らしい精度ですね。
これにナットやワッシャーを通して台座代わりにしますよ。
イメージ的にはこんな感じ。

スペーサー - M3ワッシャ - M4ワッシャ - M5ワッシャ ---- M4ワッシャ - M3ワッシャ
M5ワッシャーを入れないと、アルミフレームに対して垂直に固定することが出来ないので
結構重要です。
スペーサーとフレームの間にワッシャが3枚も挟んでいるので厚みの精度が狂うのでは?
と疑問に思いましたが、ノギスで計るとキッチリ精度が出ていたので心配ありませんでした。
それではフレームに付けて見ます。

こんなイメージで付けます。
この上からスペーサーを付けてガッチリ緩まないように固定します。
下はネジなんだから、スペーサーを付けようとしても空回りするんじゃない?
と思う人は当然いるかと思いますが、
ネジ頭のスキマに平たい棒を刺しこんでネジが摩擦で回りにくい環境を作ってあげると
ワッシャーが間に入っているおかげか、案外キツく締めることが出来るのです。
このような方法で6カ所取り付けしますよ。
完成したときの写真がこれです。

これで水平になったのか?と思いきや、
まだ詰めが甘かったのでした。
↓赤○の部分を見てみます。
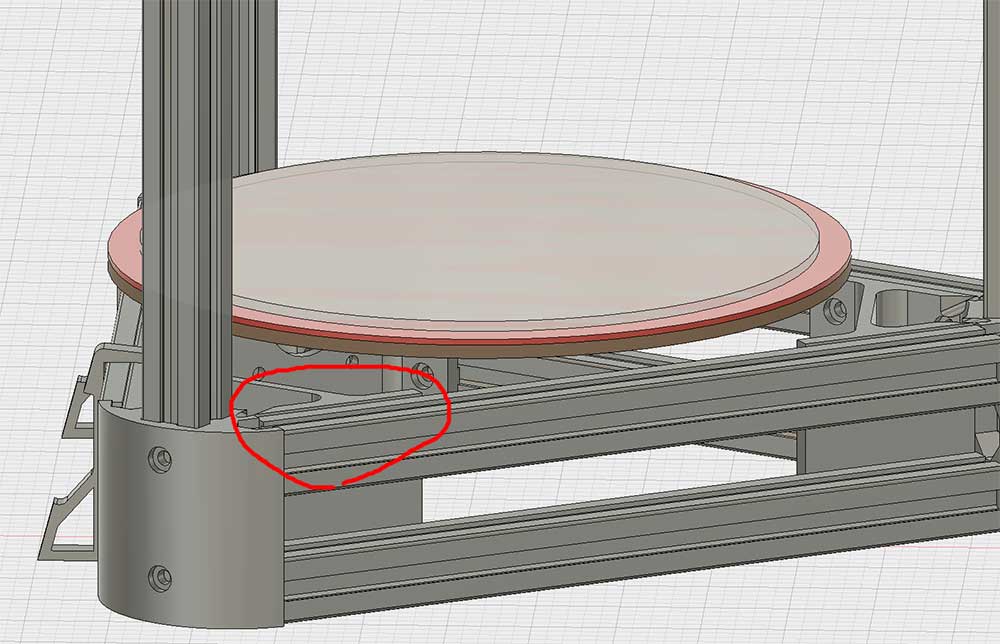
↓見にくいので拡大してみます。
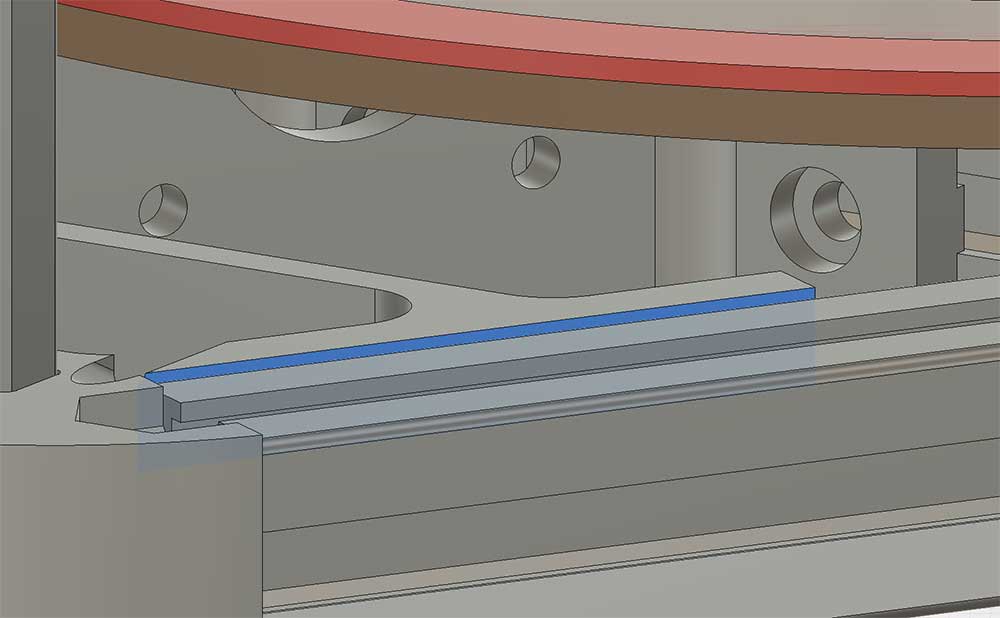
遊び部分に青く色を付けてみました。
アルミフレームをコーナーパーツに固定する際、精度の甘さを吸収するためだと思いますが、
ある程度遊びがあるので、上の図の青い部分のスキマが
各辺によって微妙に違ってしまう問題があります。

↑の図ではスキマを完全に埋めるためにアルミフレームを上に寄せた状態です。
上寄せと下寄せで最大0.6mm程の差がでます。
このスキマを各辺全て統一させる作業も水平を作るには重要なことでした。
さて、すこし疲れてきました。
ここまでやれば、ベッドの高さは水平になるよね?
そう願いながら、またテスト印刷して角度を調べてみます。
結果
4角のうち3角はほぼ隙間無しになった気がします。
極端に歪んでた1角も2mmから0.5mmまでスキマが小さくなりました。
改善はされたものの完治はしてないですね。まだ他に原因があるようです。
困ったorz
また何か対策を講じなくてはいけませんね。
ま、こんな状況でも印刷はしてみたくなる物です。
定番のルークを印刷してみましたよ。

結構キレイに印刷される物ですね。
直径が小さいのでそれほど影響が無いのでしょうか

左が0.2mm積層、右が0.1mmです。段違いで0.1mmはキレイです。

螺旋階段も0.1mmは角が立っています。
これは0.05mm印刷が可能なマエストロはどれほど綺麗な印刷になるんでしょうか・・
少し欲しくなりました・・(笑)





