キーロガーを止める方法があったのね
2016.10.31
Windows10が登場したときに何がイヤだったかというと、
個人情報をMSが収集することを解除できないということでした。
WindowsUpdateも強制で行われますし、
そのせいでアプリも動かないのがでてくるし、BSODになるPCも多く見ました。
そのような状況をみていると、10にしても良いこと無いように感じます。
ですが、今は大分事情が変わってきているようですね。
知らないうちに有志がキーロガーの解除方法を見つけていたようです。
早速私も行います。
まずは、コマンドプロンプトを管理者権限で立ち上げて、
reg add HKLM\SOFTWARE\Policies\Microsoft\Windows\DataCollection /v AllowTelemetry /t REG_DWORD /d 0 /f
これを実行する。これは、Win10の設定>フィードバックと診断 の画面にある
「診断データと使用状況データ」のリストボックスを無効にする役割があるようです。
次に情報を収集するDiagTrackの動きを止めます。
sc stop DiagTrack
sc config DiagTrack start=disabled
そして削除
sc delete DiagTrack
次に収集した情報を送信するdmwappushserviceを消します。
sc delete dmwappushservice
とりあえずこれで一安心ですが、
なんか面倒な作業を一度に、GUIで操作したい、もっとあらゆることをキッチリ処理したい人は
DisableWinTracking (https://github.com/10se1ucgo/DisableWinTracking)
こういったソフトがあります。
Windowsアップデートを行うと復活することがあるそうですが、
上の処理だけじゃなく、ファイヤーウォールで止めたり、Hostsで止めたりと機能てんこもり。
便利になったものですね。ソースコードも配布しているので、
ウイルスやスパイウェアが組み込まれている可能性は低そうですよ。
弊害などはわからないので、まぁ、自己責任で。
個人情報をMSが収集することを解除できないということでした。
WindowsUpdateも強制で行われますし、
そのせいでアプリも動かないのがでてくるし、BSODになるPCも多く見ました。
そのような状況をみていると、10にしても良いこと無いように感じます。
ですが、今は大分事情が変わってきているようですね。
知らないうちに有志がキーロガーの解除方法を見つけていたようです。
早速私も行います。
まずは、コマンドプロンプトを管理者権限で立ち上げて、
reg add HKLM\SOFTWARE\Policies\Microsoft\Windows\DataCollection /v AllowTelemetry /t REG_DWORD /d 0 /f
これを実行する。これは、Win10の設定>フィードバックと診断 の画面にある
「診断データと使用状況データ」のリストボックスを無効にする役割があるようです。
次に情報を収集するDiagTrackの動きを止めます。
sc stop DiagTrack
sc config DiagTrack start=disabled
そして削除
sc delete DiagTrack
次に収集した情報を送信するdmwappushserviceを消します。
sc delete dmwappushservice
とりあえずこれで一安心ですが、
なんか面倒な作業を一度に、GUIで操作したい、もっとあらゆることをキッチリ処理したい人は
DisableWinTracking (https://github.com/10se1ucgo/DisableWinTracking)
こういったソフトがあります。
Windowsアップデートを行うと復活することがあるそうですが、
上の処理だけじゃなく、ファイヤーウォールで止めたり、Hostsで止めたりと機能てんこもり。
便利になったものですね。ソースコードも配布しているので、
ウイルスやスパイウェアが組み込まれている可能性は低そうですよ。
弊害などはわからないので、まぁ、自己責任で。
 2016.10.31 02:00
|
2016.10.31 02:00
| 



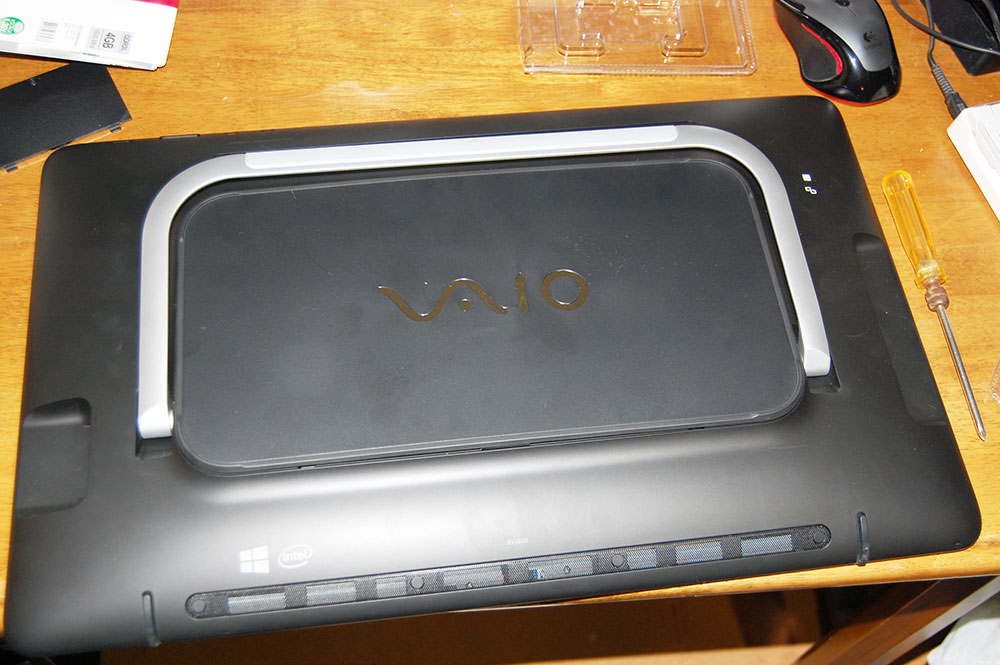
VAIO SVJ2023AJ タブレット型PCがやってきた
2016.10.31
いろいろありまして、
2013年6月モデルのVAIO Tap20(SVJ2023AJ)
がウチにやってきました。(上の写真は公式ページからの直リンです)
中古なんですが、スペック上はまだまだ現役で使えるハズ。
Windows8が悪さしているのか、メモリが2GBしかないせいなのか、
基本設計がノートに毛が生えた程度だからなのか、
とにかく激遅で仕事で使うには拷問という状態でウチにきました。
本来の性能を生かしきるためにHDDをSSDに、メモリを2GBから4GB足して6GBにします。

作業は超簡単。背面の中央のパネルを爪でひっかけキュっと引っ張るだけでパネルが外れます。

あとは、左側のHDD部と右側のメモリ部にアクセスすることができます。
それぞれのパネルはネジ一本で止まっているのでそれを外すと

こんな感じにパーツにご対面できます。
SSDはこんな時のために残していたIntelの128GB

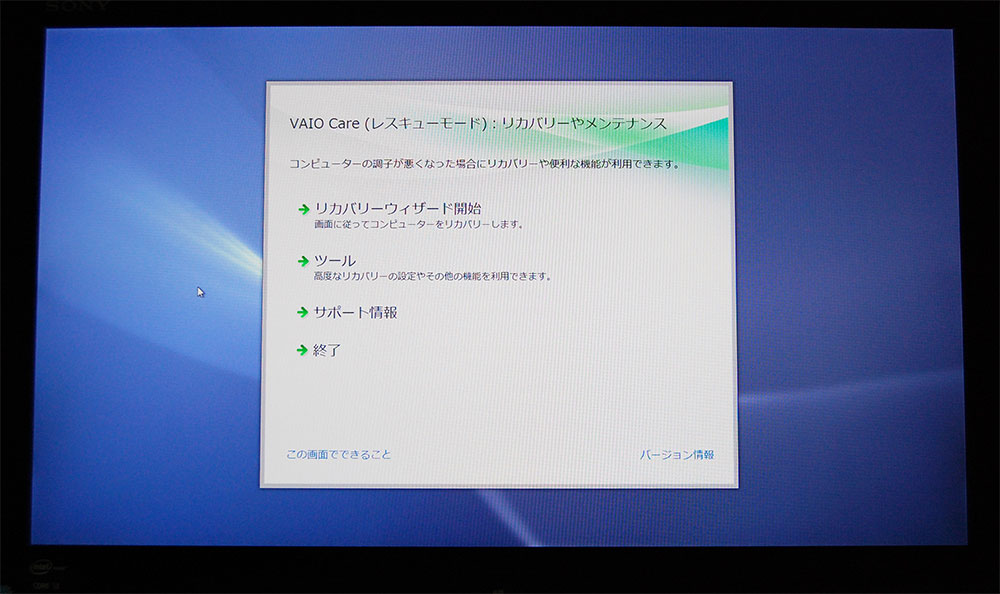
組み替えたら早速リカバリ。
ASSISTボタンを押して、ディスクブートさせてリカバリ作業。

おおむね1時間半近くかかりました。DVDの読み込みが影響してるのかな。
リカバリが終了して、初期セットアップ・・
うん、速いぞ。復活じゃ!
このまま使ってもいいのですが、
Windows8だと将来性が無いので、
Windows10への変更も考えましょうかね。
(悪名高いMSの強制アップデートは終わりましたが、
意図はわかりませんが、手動であればまだアップできるようですし・・)
https://www.microsoft.com/ja-jp/software-download/windows10
2013年6月モデルのVAIO Tap20(SVJ2023AJ)
がウチにやってきました。(上の写真は公式ページからの直リンです)
中古なんですが、スペック上はまだまだ現役で使えるハズ。
Windows8が悪さしているのか、メモリが2GBしかないせいなのか、
基本設計がノートに毛が生えた程度だからなのか、
とにかく激遅で仕事で使うには拷問という状態でウチにきました。
本来の性能を生かしきるためにHDDをSSDに、メモリを2GBから4GB足して6GBにします。
作業は超簡単。背面の中央のパネルを爪でひっかけキュっと引っ張るだけでパネルが外れます。

あとは、左側のHDD部と右側のメモリ部にアクセスすることができます。
それぞれのパネルはネジ一本で止まっているのでそれを外すと

こんな感じにパーツにご対面できます。
SSDはこんな時のために残していたIntelの128GB

組み替えたら早速リカバリ。
ASSISTボタンを押して、ディスクブートさせてリカバリ作業。
おおむね1時間半近くかかりました。DVDの読み込みが影響してるのかな。
リカバリが終了して、初期セットアップ・・
うん、速いぞ。復活じゃ!
このまま使ってもいいのですが、
Windows8だと将来性が無いので、
Windows10への変更も考えましょうかね。
(悪名高いMSの強制アップデートは終わりましたが、
意図はわかりませんが、手動であればまだアップできるようですし・・)
https://www.microsoft.com/ja-jp/software-download/windows10
EPSON EP-804Aのヘッド詰まりをなんとかする。
2016.10.30
社外品インクを頻繁に使用するせいか、
うちのEP-804A君はインク詰まりが良く起ます。
ヘッドクリーニングを行うとインクが大量に消費されてしまうのですが、
それでも安さには代えられません。
だって、こんなに安いんだもん( ´艸`)
黒だけ消費が早いのですが、そんなときはコレ
どちらも送料込みで300円前後なので買わない手は無いわけです(笑)
そんなこんなで、どんなにクリーニングしても
目詰まりが解消できないところまで来てしまいました。
804Aいいんですよ、コイツは。DVDトレー内蔵だし、
インクとヘッドが別体なので、
ヘッドを移動させなくてもカートリッジ交換でき、
インクボトルと直結なんて裏技も使えます。
なので出来ればコイツをなんとかして蘇えらせたいということなのです。
ではどうしたらよいのか
アマゾンさんで、「お客様の声からうまれたプリンターの目詰まり解消」
というのを買ってみました。
CANONのヘッドが外れるタイプは、
無水アルコールか中性洗剤でつけ置き洗浄した経験があるのですが、
EPSONでしかも専用薬剤を使って行う作業というのは初めての試みです。
車のケミカル品よろしく、こういったものはあまり信じない方なんですが、
背に腹はかえられません。果たして成功するのか?
まずは箱から出したるこの溶剤

結構青い。箱に書いてある主成分を見ると、
「イオン化生成水・Nanoアクティベーター・インク溶解液 他」
なんか、聞いたことないものが(笑)
説明書は同梱されいますが、簡易すぎて不安。
なので販売元のサイトを見て作業します。
http://www.05034752415.com/userguide/index.html
説明書の通り、薬剤を注射器にいれ、インクを吸い取って混ぜて、


今度は混合液を注入。これを全色行いました。
2,3時間したらカートリッジを付けて、ふたを閉めず、電源は入れたまま放置。
これが基本らしいですが、寝かす時間は
ネット情報では2,3日やると効果覿面とのこと。
3日後・・・
効果があるのかないのかよくわかりません(笑)
ガッチガチに固まってしまったものは効果が薄いかもしれませんね・・
結局詰りがとれないので、無水エタノールを注射器で思いっきり注入して、
圧力で詰まりを取りました。ハイ、力業です。
注ぎ過ぎたのか、ヘッド下のスポンジで吸収できずに、
ちょっぴり液漏れしちゃいましたが、今は元気に動いてます。
うちのEP-804A君はインク詰まりが良く起ます。
ヘッドクリーニングを行うとインクが大量に消費されてしまうのですが、
それでも安さには代えられません。
だって、こんなに安いんだもん( ´艸`)
黒だけ消費が早いのですが、そんなときはコレ
どちらも送料込みで300円前後なので買わない手は無いわけです(笑)
そんなこんなで、どんなにクリーニングしても
目詰まりが解消できないところまで来てしまいました。
804Aいいんですよ、コイツは。DVDトレー内蔵だし、
インクとヘッドが別体なので、
ヘッドを移動させなくてもカートリッジ交換でき、
インクボトルと直結なんて裏技も使えます。
なので出来ればコイツをなんとかして蘇えらせたいということなのです。
ではどうしたらよいのか
アマゾンさんで、「お客様の声からうまれたプリンターの目詰まり解消」
というのを買ってみました。
CANONのヘッドが外れるタイプは、
無水アルコールか中性洗剤でつけ置き洗浄した経験があるのですが、
EPSONでしかも専用薬剤を使って行う作業というのは初めての試みです。
車のケミカル品よろしく、こういったものはあまり信じない方なんですが、
背に腹はかえられません。果たして成功するのか?
まずは箱から出したるこの溶剤

結構青い。箱に書いてある主成分を見ると、
「イオン化生成水・Nanoアクティベーター・インク溶解液 他」
なんか、聞いたことないものが(笑)
説明書は同梱されいますが、簡易すぎて不安。
なので販売元のサイトを見て作業します。
http://www.05034752415.com/userguide/index.html
説明書の通り、薬剤を注射器にいれ、インクを吸い取って混ぜて、


今度は混合液を注入。これを全色行いました。
2,3時間したらカートリッジを付けて、ふたを閉めず、電源は入れたまま放置。
これが基本らしいですが、寝かす時間は
ネット情報では2,3日やると効果覿面とのこと。
3日後・・・
効果があるのかないのかよくわかりません(笑)
ガッチガチに固まってしまったものは効果が薄いかもしれませんね・・
結局詰りがとれないので、無水エタノールを注射器で思いっきり注入して、
圧力で詰まりを取りました。ハイ、力業です。
注ぎ過ぎたのか、ヘッド下のスポンジで吸収できずに、
ちょっぴり液漏れしちゃいましたが、今は元気に動いてます。





