3D-PRT27)キャリッジとエフェクターをメタル化した結果
2016.10.12
今回はエフェクターとキャリッジの交換についてです。
情報をたくさん入れすぎたのでちょっとまとまりの無い記事になりましたが
ご容赦を。
========================================================
かなり前に予備としてホットエンドも買っておいたのですが
いい機会なのでそれも使って改修作業を行います。
ホットエンドは「だっこちゃん人形」よろしくヒートシンク部にファンが付くタイプ。

https://ja.aliexpress.com/item/3D-printer-E3DV6-remote-print-head-extruder-with-fan-bracket/32299545650.html
今まで使っていたものは「e3d v5」というものらしい。
新しいのは「E3d v6 j-head」
つまりバージョンが新しくなったやつのクローン?
しかしながら、本家(http://e3d-online.com/E3D-v6/Metal-Only)と比べて
色合いや細部の作りがなんか違うのでイヤーな臭いがプンプンしますが、
面白いので良しとします。
どう変わるのか、結果は記事の後半で。
さて、エフェクターとキャリッジを交換し終えてすぐわかる変化が!
驚くほど遊びが無くなりました。
前はエフェクターを軽くデコピンすると、ビーンという振動と共に
揺れ幅が目で確認できたのですが、
それが今回は大幅に抑え込まれています。素晴らしい。
交換が終わりましたが、エフェクターとキャリッジの2種類のパーツを変えると、
以下の点を見直す必要がありますね。
・エンドストップを押すピンの位置に問題はないか?
・キャリッジの厚みが変わるのでタイミングベルトと
プーリーの位置関係に問題は無いか?
・キャリッジとエフェクターのサイズが違うので、Radius値が大幅に変わる。
・印刷可能エリアが大幅に変わる。もちろん高さも。
・重量が増えるので、モーターのトルクが間に合うか?
全てに問題が出てきましたが
今までの調整の経験があればすべて解決可能でした。
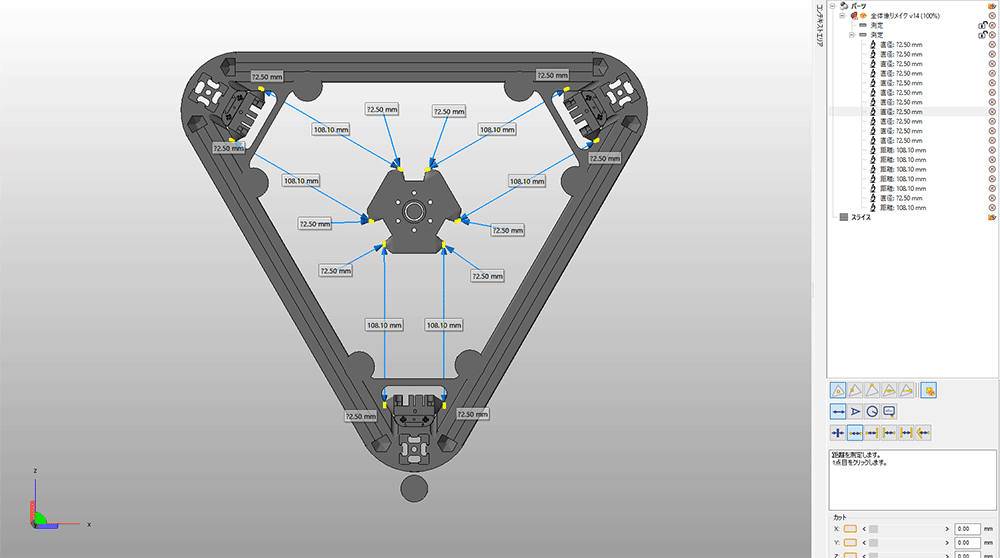
Radiusだけはチマチマやっていてはラチが開かないので、
3Dで図面引いて理論値を出してから詰めました。


実際のRadiusは109.12 でした。理論値は108.099ですが
部品の精度や組み立ての粗さで半径1mm近く外に膨らんでいるのですね。
最近Radiusの調整で質問されたのでここでちょっと書いておきます。
「Radiusを弄っても中央の高さがほとんど変化しないので、
正しいRadius値がわからない」
という話がありました。
そもそもRadiusが狂っているとどうなるかというと、ベッドの内と外で高さが変わるのです。
そのことから、X,Y,Z軸の高さと中央の高さを調べて調整するわけですが、
X,Y,Z軸の高さを統一してからRadiusを調整する方がほとんどだと思います。
もちろんこの手順が正解なのですが、ここでX,Y,Z軸が確定して変化しないものと
思い込んでしまっているとRadius問題は解けません。
実はRadiusを弄っても中央の高さはほとんど変化しません。
変化するのは、X,Y,Z軸の方です。
X,Y,Z軸の高さが統一されていれば、それぞれ同じだけ変化するはずです。
なのでZ軸と中央を見比べて調整すれば問題ないはずです。
========================================================
エンドストップとピンとの関係は
今回、ホームセンターで素敵なネジを見つけたので、それに変更を行うことで
ギリギリセーフです。



超薄型!完全フラット!
頭に厚みがないのでスイッチに頭が先に触れる心配がなくなりました。
(念の為、スイッチの角は落としてはいるのですが・・)
========================================================
ベルト位置が外側に動いたので、プーリーや、モーターギアの調整も必要でした。
ワッシャ1枚分の調整です。
========================================================
モータードライバの電圧も上げないと脱調を起こしました。
印刷の順序の関係で、印刷済みのラインに別のラインがクロスする場面があるのですが、
電圧が低いとそれを乗り越えられずに脱調するようです。
完全な一筆書きならこうはならないのだと思いますが・・・
今はXYZ軸用に0.4Vにして安定しました。
========================================================
前のエフェクターは、ノズルがバネで引っ込む仕組みがありました。
オートレベリング用のピンををノズルが代わりに担うためですね。
今回エフェクターを交換したことでこの仕組みは排除となります。
つまり、ノズルの先には遊びは全くないということ。
誤った設定をしてしまうと、ガラスに激突して、
あらゆるパーツを破損してしまう可能性があります。
ある程度経験がないと物凄く怖いことなんですが、
調整の手順を知っている今の私なら、それほどでもありません。
最終的に導き出した高さは274.41mmです。
エフェクター交換前は300.3mmなので、
25.89mm短くなった計算です。
デルタは高さに余裕ありますのでこれくらいは全く問題じゃありません。
逆に印刷できる直径は大幅に増えましたよ。
それはなぜか? キャリッジが薄くなったからです。
あと、ヒートシンクを冷やすファンがエフェクターの外径より内側になる事でより柱側へ寄れるようになりました。
前はタイミングベルトに激突してましたからねぇ・・orz

前は74mm(直径148mm)が限度でしたが85mmまでいけます。
安全のために80mm(直径160mm)で設定しますが、
前の安全圏エリア140mmに比べて2cmも大きくなっています。
これは素晴らしいですね。外側により寄れれば調整の精度も上がりますし、
良いことづくめ。
=======================================================
さて今回はヒートベッドの固定具もグレードアップさせました。
前々から、こんな感じ↓のT型ヘッドネジがあれば、
ヒートベッドの高さをリアルタイム微調整できると考えていました。

そうしたら友人から目からウロコなアイデアが。
「瞬間接着剤で接着すると二度と外れないくらいの強度がでるよ」と。
やってみたらマジでした。
(垂直に接着するためにナットを通してきつく締めて固まるのを待ちます)
両手の力だけで外すのは困難なぐらいガッチリつきます。
まさかT型ヘッドつきのネジがこんな簡単に作れるとは・・・
(T型ナットはAliexpressで数百円で数十個とか買えますよ。)
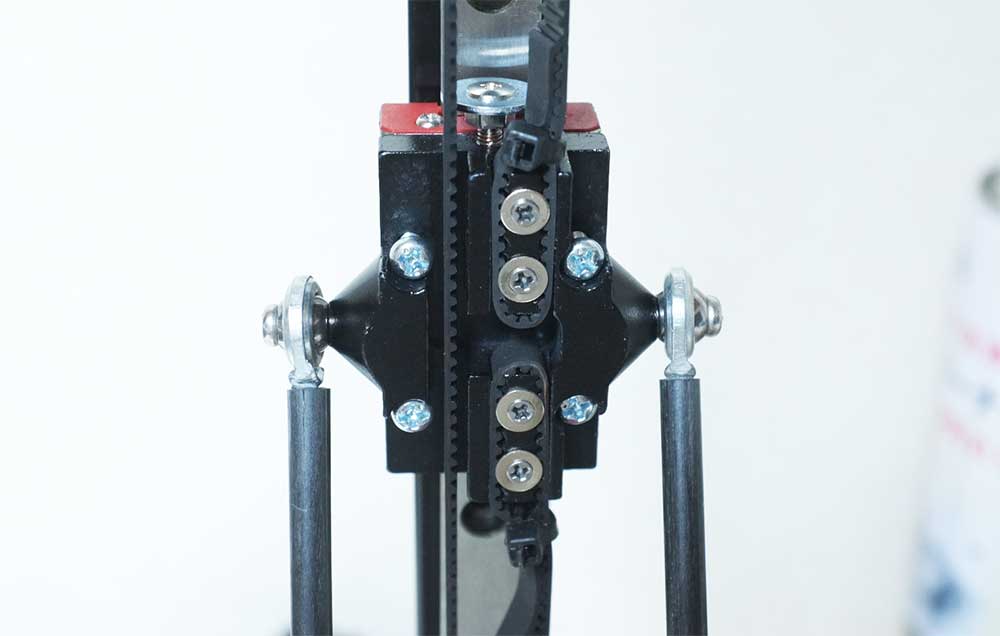
このアイデアでこのように組んでみます。

間に入れるバネはキットに付属してきたものだと力がイマイチなので
日本のステンレス製バネに変えました。

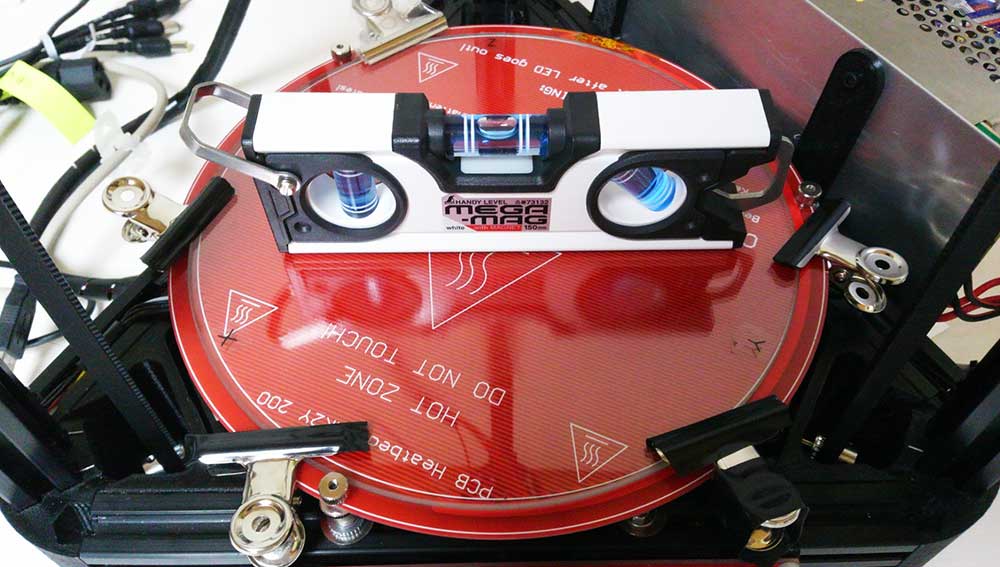
取り付けた状態の写真はこちら↓

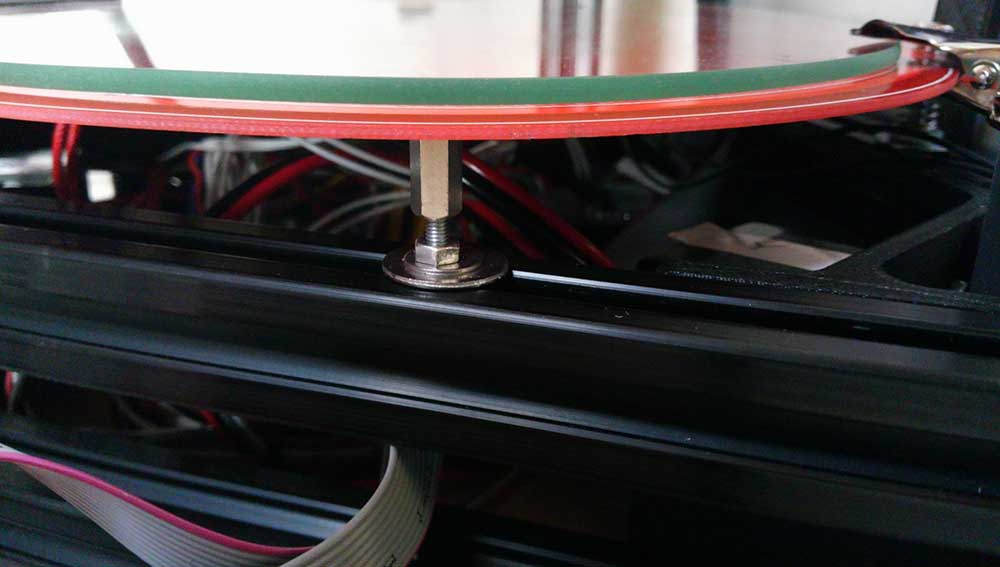
ヒートベッドは3点で固定されますが、これだけだと、
歪みが出てしまうので他に3点を以下の様に台座を作りました。

指で調整できないのは難点ですが、小さいスパナでスペーサーを回転させれば
微調整が可能です。これもT型ネジがあればこそできたことです。
微調整が滑らかにできるようになったので、大雑把な調整も楽になりました。

水平器での調整も楽ちんです。
一番嬉しいのは、ヒートベッドを温めた状態でスムーズに調整できることですね。
前ならちょっと調整するたびにヒートベッドを外さないといけませんでした。
ダイヤルゲージでの調整も近いうちに行いますが、
その時も楽にできそうです。
========================================================
さて、そろそろ印刷テストと行きたいところですが、
懸念してたホットエンドのトラブルが発生ですよ。
ヒートシンクの出口あたりで引っかかり、
ヒートブロックまでフィラメントが行かないのです。
PTFEパイプが悪さしていると思うのですが、
手で押しても何か引っかかりがあって、入っていきません。
偶然入った時もありましたが、ホットエンドの温度を上昇させると、
入った部分が溶けて、また引っかかりが生まれます。
あえて言おう、Jhead品は、再加工無しでは使用は厳しいorz
結局ラチがあかないので、ヒートシンク部は
前のE3d v5の部分を再利用して問題を解決しました。
ヒートシンクの径がv5のは太いのでファンが付くか不安でしたが、
力強く押したらパコっとハマって事なきを得ました。
安物パーツというのはリスクと隣り合わせです(^-^)
時間がに余裕ができたら異常のあったパーツをボール盤で削ってみます。
入り口を少し傾斜つけてあげれば引っかかりもなく滑らかに入るんじゃないかな?
========================================================
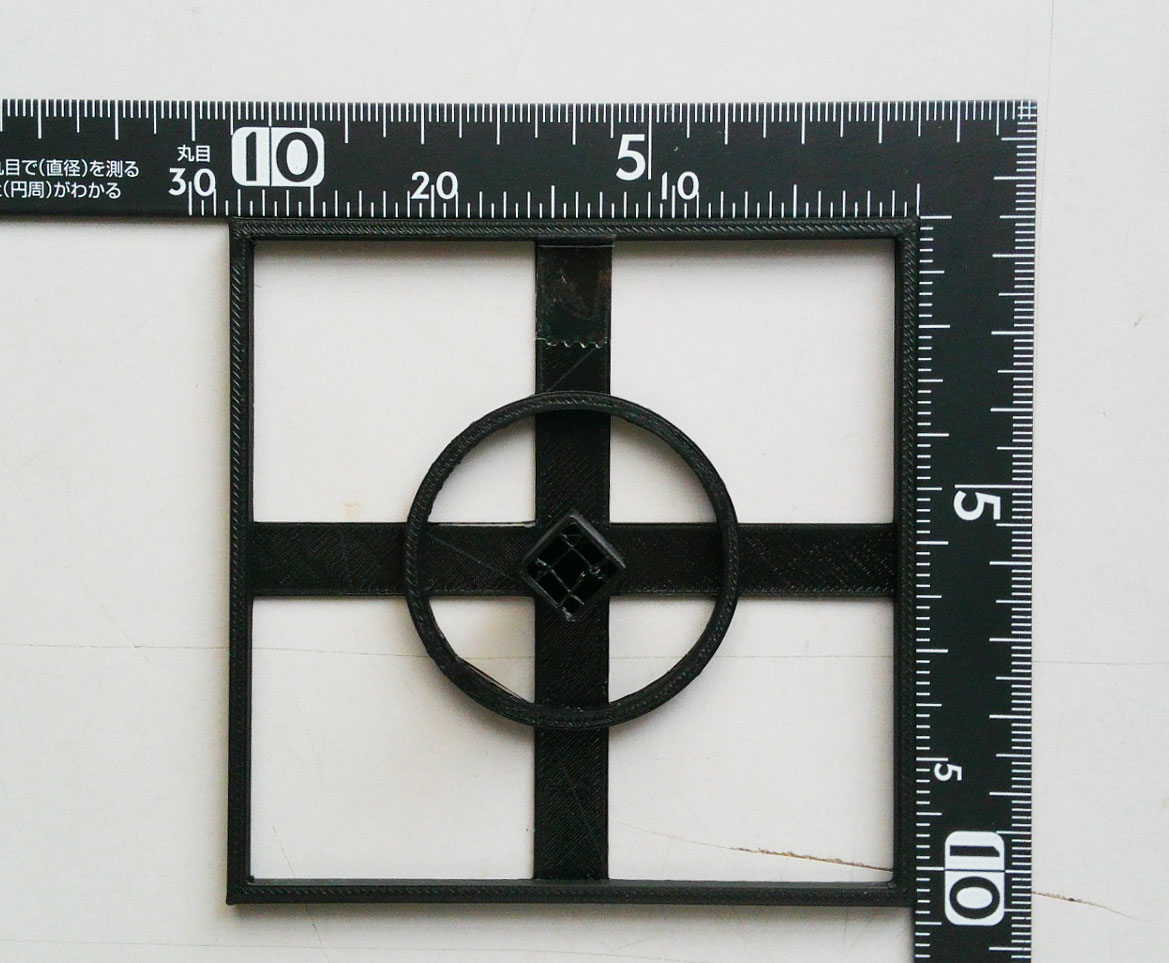
アバウト調整が終わったところで印刷へレッツゴーです。
前回と同じく、
http://www.thingiverse.com/thing:13441
XYZ-Circle_Cal_-_90mm.stl
このデータを使います。
印刷中の映像はこちら↓
糸引きが全くなくなりました。リトラクトが正常に働いている感じです。
前はヒートシンクの冷却がうまくいってないのか、
ほとんど巻き上げれない感じだったので、
E3D V6のホットエンドはV5に比べ地味に性能上がっているのかもしれませんね。
ブレが無いのか、ノズルの移動により精細を増した気が・・・ 気のせい?
問題としては一層目にすこし隙間がある事と
あと、ほとんど気にならないレベルですが、横線にブツブツがでてるところでしょうか。
ここらへんはスライサーの設定でなんとかなりそうです。
で、出来上がったものの角度を調べてみます。

完璧!
いよいよここまで来ました。
四角もほぼ90度で、今までの印刷では見たことないカッチリ感です。
あとは前に行った
http://www.thingiverse.com/thing:745523
を印刷し、ロッドの長さと角度をを調整すれば、
おおむね完成です。
ハード周りは満足いくレベルにだいぶ近づいたのではないでしょうか?
次回からは、スライサーの設定を煮詰める世界に突入ですかねぇ・・
今度は、なにか物をつくってみますかね。
情報をたくさん入れすぎたのでちょっとまとまりの無い記事になりましたが
ご容赦を。
========================================================
かなり前に予備としてホットエンドも買っておいたのですが
いい機会なのでそれも使って改修作業を行います。
ホットエンドは「だっこちゃん人形」よろしくヒートシンク部にファンが付くタイプ。

https://ja.aliexpress.com/item/3D-printer-E3DV6-remote-print-head-extruder-with-fan-bracket/32299545650.html
今まで使っていたものは「e3d v5」というものらしい。
新しいのは「E3d v6 j-head」
つまりバージョンが新しくなったやつのクローン?
しかしながら、本家(http://e3d-online.com/E3D-v6/Metal-Only)と比べて
色合いや細部の作りがなんか違うのでイヤーな臭いがプンプンしますが、
面白いので良しとします。
どう変わるのか、結果は記事の後半で。
さて、エフェクターとキャリッジを交換し終えてすぐわかる変化が!
驚くほど遊びが無くなりました。
前はエフェクターを軽くデコピンすると、ビーンという振動と共に
揺れ幅が目で確認できたのですが、
それが今回は大幅に抑え込まれています。素晴らしい。
交換が終わりましたが、エフェクターとキャリッジの2種類のパーツを変えると、
以下の点を見直す必要がありますね。
・エンドストップを押すピンの位置に問題はないか?
・キャリッジの厚みが変わるのでタイミングベルトと
プーリーの位置関係に問題は無いか?
・キャリッジとエフェクターのサイズが違うので、Radius値が大幅に変わる。
・印刷可能エリアが大幅に変わる。もちろん高さも。
・重量が増えるので、モーターのトルクが間に合うか?
全てに問題が出てきましたが
今までの調整の経験があればすべて解決可能でした。
Radiusだけはチマチマやっていてはラチが開かないので、
3Dで図面引いて理論値を出してから詰めました。

実際のRadiusは109.12 でした。理論値は108.099ですが
部品の精度や組み立ての粗さで半径1mm近く外に膨らんでいるのですね。
最近Radiusの調整で質問されたのでここでちょっと書いておきます。
「Radiusを弄っても中央の高さがほとんど変化しないので、
正しいRadius値がわからない」
という話がありました。
そもそもRadiusが狂っているとどうなるかというと、ベッドの内と外で高さが変わるのです。
そのことから、X,Y,Z軸の高さと中央の高さを調べて調整するわけですが、
X,Y,Z軸の高さを統一してからRadiusを調整する方がほとんどだと思います。
もちろんこの手順が正解なのですが、ここでX,Y,Z軸が確定して変化しないものと
思い込んでしまっているとRadius問題は解けません。
実はRadiusを弄っても中央の高さはほとんど変化しません。
変化するのは、X,Y,Z軸の方です。
X,Y,Z軸の高さが統一されていれば、それぞれ同じだけ変化するはずです。
なのでZ軸と中央を見比べて調整すれば問題ないはずです。
========================================================
エンドストップとピンとの関係は
今回、ホームセンターで素敵なネジを見つけたので、それに変更を行うことで
ギリギリセーフです。


超薄型!完全フラット!
頭に厚みがないのでスイッチに頭が先に触れる心配がなくなりました。
(念の為、スイッチの角は落としてはいるのですが・・)
========================================================
ベルト位置が外側に動いたので、プーリーや、モーターギアの調整も必要でした。
ワッシャ1枚分の調整です。
========================================================
モータードライバの電圧も上げないと脱調を起こしました。
印刷の順序の関係で、印刷済みのラインに別のラインがクロスする場面があるのですが、
電圧が低いとそれを乗り越えられずに脱調するようです。
完全な一筆書きならこうはならないのだと思いますが・・・
今はXYZ軸用に0.4Vにして安定しました。
========================================================
前のエフェクターは、ノズルがバネで引っ込む仕組みがありました。
オートレベリング用のピンををノズルが代わりに担うためですね。
今回エフェクターを交換したことでこの仕組みは排除となります。
つまり、ノズルの先には遊びは全くないということ。
誤った設定をしてしまうと、ガラスに激突して、
あらゆるパーツを破損してしまう可能性があります。
ある程度経験がないと物凄く怖いことなんですが、
調整の手順を知っている今の私なら、それほどでもありません。
最終的に導き出した高さは274.41mmです。
エフェクター交換前は300.3mmなので、
25.89mm短くなった計算です。
デルタは高さに余裕ありますのでこれくらいは全く問題じゃありません。
逆に印刷できる直径は大幅に増えましたよ。
それはなぜか? キャリッジが薄くなったからです。
あと、ヒートシンクを冷やすファンがエフェクターの外径より内側になる事でより柱側へ寄れるようになりました。
前はタイミングベルトに激突してましたからねぇ・・orz

前は74mm(直径148mm)が限度でしたが85mmまでいけます。
安全のために80mm(直径160mm)で設定しますが、
前の安全圏エリア140mmに比べて2cmも大きくなっています。
これは素晴らしいですね。外側により寄れれば調整の精度も上がりますし、
良いことづくめ。
=======================================================
さて今回はヒートベッドの固定具もグレードアップさせました。
前々から、こんな感じ↓のT型ヘッドネジがあれば、
ヒートベッドの高さをリアルタイム微調整できると考えていました。

そうしたら友人から目からウロコなアイデアが。
「瞬間接着剤で接着すると二度と外れないくらいの強度がでるよ」と。
やってみたらマジでした。
(垂直に接着するためにナットを通してきつく締めて固まるのを待ちます)
両手の力だけで外すのは困難なぐらいガッチリつきます。
まさかT型ヘッドつきのネジがこんな簡単に作れるとは・・・
(T型ナットはAliexpressで数百円で数十個とか買えますよ。)
このアイデアでこのように組んでみます。

間に入れるバネはキットに付属してきたものだと力がイマイチなので
日本のステンレス製バネに変えました。

取り付けた状態の写真はこちら↓

ヒートベッドは3点で固定されますが、これだけだと、
歪みが出てしまうので他に3点を以下の様に台座を作りました。
指で調整できないのは難点ですが、小さいスパナでスペーサーを回転させれば
微調整が可能です。これもT型ネジがあればこそできたことです。
微調整が滑らかにできるようになったので、大雑把な調整も楽になりました。
水平器での調整も楽ちんです。
一番嬉しいのは、ヒートベッドを温めた状態でスムーズに調整できることですね。
前ならちょっと調整するたびにヒートベッドを外さないといけませんでした。
ダイヤルゲージでの調整も近いうちに行いますが、
その時も楽にできそうです。
========================================================
さて、そろそろ印刷テストと行きたいところですが、
懸念してたホットエンドのトラブルが発生ですよ。
ヒートシンクの出口あたりで引っかかり、
ヒートブロックまでフィラメントが行かないのです。
PTFEパイプが悪さしていると思うのですが、
手で押しても何か引っかかりがあって、入っていきません。
偶然入った時もありましたが、ホットエンドの温度を上昇させると、
入った部分が溶けて、また引っかかりが生まれます。
あえて言おう、Jhead品は、再加工無しでは使用は厳しいorz
結局ラチがあかないので、ヒートシンク部は
前のE3d v5の部分を再利用して問題を解決しました。
ヒートシンクの径がv5のは太いのでファンが付くか不安でしたが、
力強く押したらパコっとハマって事なきを得ました。
安物パーツというのはリスクと隣り合わせです(^-^)
時間がに余裕ができたら異常のあったパーツをボール盤で削ってみます。
入り口を少し傾斜つけてあげれば引っかかりもなく滑らかに入るんじゃないかな?
========================================================
アバウト調整が終わったところで印刷へレッツゴーです。
前回と同じく、
http://www.thingiverse.com/thing:13441
XYZ-Circle_Cal_-_90mm.stl
このデータを使います。

印刷中の映像はこちら↓
糸引きが全くなくなりました。リトラクトが正常に働いている感じです。
前はヒートシンクの冷却がうまくいってないのか、
ほとんど巻き上げれない感じだったので、
E3D V6のホットエンドはV5に比べ地味に性能上がっているのかもしれませんね。
ブレが無いのか、ノズルの移動により精細を増した気が・・・ 気のせい?
問題としては一層目にすこし隙間がある事と
あと、ほとんど気にならないレベルですが、横線にブツブツがでてるところでしょうか。
ここらへんはスライサーの設定でなんとかなりそうです。
で、出来上がったものの角度を調べてみます。
完璧!
いよいよここまで来ました。
四角もほぼ90度で、今までの印刷では見たことないカッチリ感です。
あとは前に行った
http://www.thingiverse.com/thing:745523
を印刷し、ロッドの長さと角度をを調整すれば、
おおむね完成です。
ハード周りは満足いくレベルにだいぶ近づいたのではないでしょうか?
次回からは、スライサーの設定を煮詰める世界に突入ですかねぇ・・
今度は、なにか物をつくってみますかね。
 2016.10.12 20:03
|
2016.10.12 20:03
| 


Windows10に古いグラボを認識させる。
2016.10.06
ドライバの強制更新のせいでi5のオンボードVGAにトラブルが出ているのが
身近に結構あります。i7は知らない( ´艸`)
古いドライバにすることで一時期はしのいだのですが、
最近のWindowsアップデートによって、古いドライバーでも止まってしまう症状が
出始めています。
そこでオンボードVGAとはオサラバして、適当なグラボを挿して
トラブル回避しようと考えたですが、
手元にある適当なグラボがRadeon X1650Proです(笑)
Windows10に対応どころかWindows7にすら対応してません。
ラストOSはVistaですね。
こいつを自動で認識させようとした場合、
適切なドライバーを見つけられないので
入れることができません。
AMDからVista用のドライバを落としてきてインストールしようとしても、
インストーラがボードを認識してくれないので、セットアップが途中で止まります。
提供されるドライバは圧縮ファイルで、展開先がc:\atiなのですが、
Windowsのドライバの更新で強引にそこを指定し、組み込もうとすると、

こんなエラーで落ちてしまうのです。
試行錯誤して、最適解を見つけましたが、わかってしまうと実に簡単です。
ATI系ドライバーの残骸は全てアンインストールした後
AMDからダウンロードしたファイルを実行。
ボードを認識できずセットアップは終了するのですが、
c:\atiの階層の中にあるSetup.exeを見つけ、コイツのプロパティを開き、
互換性タブから、互換モード、Windows Vista(Service Pack2)を選んで、適用するだけ。
あとはこのSetup.exeを実行すればボードを認識して問題なくセットアップされます。
身近に結構あります。i7は知らない( ´艸`)
古いドライバにすることで一時期はしのいだのですが、
最近のWindowsアップデートによって、古いドライバーでも止まってしまう症状が
出始めています。
そこでオンボードVGAとはオサラバして、適当なグラボを挿して
トラブル回避しようと考えたですが、
手元にある適当なグラボがRadeon X1650Proです(笑)
Windows10に対応どころかWindows7にすら対応してません。
ラストOSはVistaですね。
こいつを自動で認識させようとした場合、
適切なドライバーを見つけられないので
入れることができません。
AMDからVista用のドライバを落としてきてインストールしようとしても、
インストーラがボードを認識してくれないので、セットアップが途中で止まります。
提供されるドライバは圧縮ファイルで、展開先がc:\atiなのですが、
Windowsのドライバの更新で強引にそこを指定し、組み込もうとすると、
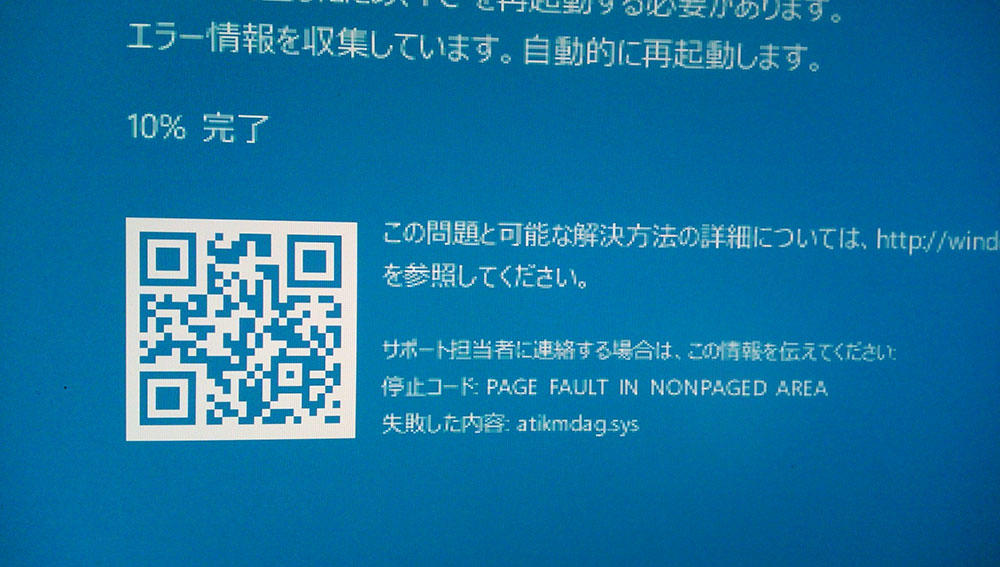
こんなエラーで落ちてしまうのです。
試行錯誤して、最適解を見つけましたが、わかってしまうと実に簡単です。
ATI系ドライバーの残骸は全てアンインストールした後
AMDからダウンロードしたファイルを実行。
ボードを認識できずセットアップは終了するのですが、
c:\atiの階層の中にあるSetup.exeを見つけ、コイツのプロパティを開き、
互換性タブから、互換モード、Windows Vista(Service Pack2)を選んで、適用するだけ。
あとはこのSetup.exeを実行すればボードを認識して問題なくセットアップされます。

Win10アップデート後、Excelの画面が崩れる
2016.10.06
先月末にWindows10の大型アップデートが走りましたが、
これにより、Excel2007で画面が崩れる症状がでています。
2013では今のところ症状は出ていません。
セルの結合を行った部分に灰色の色が付いたり、
罫線がセルとは関係ないところについたり、
スクロールに描画が追い付いてないとか、仕事に影響が出るレベルです。
Officeをインストールし直したり、Excelの設定を変更したりして、
いろいろ試しましたが、結果全く関係ないと思われる場所が原因でした。
Windows10の設定から、デバイス(bluetooth、プリンター、マウス)に入って、

↑「Windowsで通常使うプリンターを管理する」この部分をオフにするのです。
これでひとまず落ち着きます。
同じトラブルで悩んでいる人はお試しあれ。
これにより、Excel2007で画面が崩れる症状がでています。
2013では今のところ症状は出ていません。
セルの結合を行った部分に灰色の色が付いたり、
罫線がセルとは関係ないところについたり、
スクロールに描画が追い付いてないとか、仕事に影響が出るレベルです。
Officeをインストールし直したり、Excelの設定を変更したりして、
いろいろ試しましたが、結果全く関係ないと思われる場所が原因でした。
Windows10の設定から、デバイス(bluetooth、プリンター、マウス)に入って、
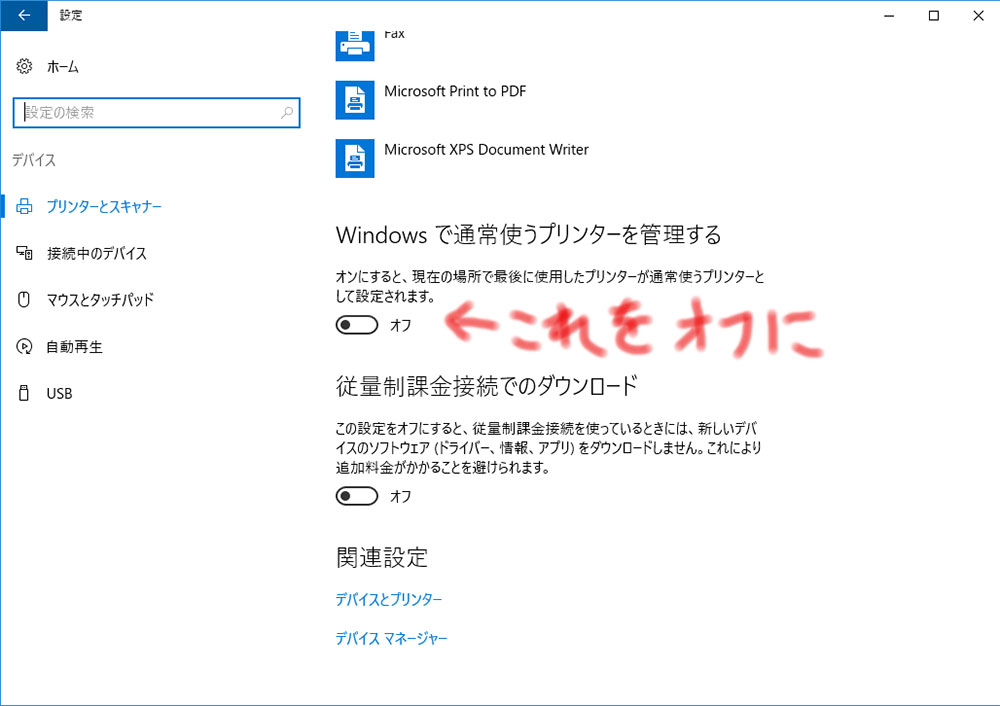
↑「Windowsで通常使うプリンターを管理する」この部分をオフにするのです。
これでひとまず落ち着きます。
同じトラブルで悩んでいる人はお試しあれ。





