iPadをAndoridユーザー用にカスタマイズする。
2018.04.01
iPad pro10.5を一週間使って感じた感想は
「120Hzのリフレッシュレートはたしかにすごいな」
が第一印象でした。
スクロールが滑らか。激しく動かしてもゆっくり動かしても
指に吸い付くように動く。これはAndoridでは感じれないものです。
残念なポイントとしては、
iosのルールを知らないので間違っているかもしれませんが、
裏方の処理がイマイチな気がします。
具体的に言うと、残量計算とか。
icloudの空き容量を見ても
アプリを一度落として開きなおさないと更新されてないとかよくあります。
これは何かの設定で変わるのですかね?
あと不思議なのは、Andoridは何か重い処理をさせると
動作が終了するまでそのアプリは他の動作を
受け付けなくなる、またはロックされることが殆どですが、
iosは他の機能も触れてしまうため、
「もう処理が終了したのか」と勘違いを招きます。
具体的な例で言うとGB単位のファイルコピーです。
アプリがロックされないので、下手に終了なんてしまうと
コピーしたつもりがコピーされていないなんてこともあったり、
一部分しかコピーされてなかったりということがあります。
iosの機嫌がいい時は〇型の進捗グラフが出るのですが、
GB単位の転送となると結構あいまいで、
表示されなかったり、表示が固まったり、
終わっているのに表示が消えなかったり。
これはZ4タブレットで使っていたデータを
iPadへ移すときに頻繁に起きて
やり直しを何回もさせられました。
OSの機能に絡むアプリがAndoridとは大分違いますね。
特に違うのが、ファイル管理。
iosはクラウドを利用するように考えられているせいか
File Commanderのようなアプリがプリインストールされていません。
一時Fileというapple製ファイラーが搭載されたと話題になりましたが
まだAndroidのようにローカル上の空き領域を
自由に扱えるような機能は持ち合わせていないようです。
そもそも、各アプリが共有できる保存領域というものがなく、
保存エリアは各アプリごとに確保されているので、
アプリ同士がデータ共有することが
とても困難だということを思い知りました。
DROPBOXのエリアが共有できるだけでも奇跡です。
これではSDメモリ対応なんて
夢のまた夢なのが良くわかります。

とりあえずDocuments6なるものをインストールしてみました。
各種クラウドにもアクセスでき、
ドラッグ&ドロップで簡単にデータを移せるという謳い文句につられたのですが、
どうもAndroidのファイラーと比べるとできないことが多くてイライラします。
クラウドとデータ転送しているときの様子が分かりにくく、
一見すると何も処理していないかの様に見えるのもマイナスポイントかな。
あと、知ってしまえば次からどうってことはないのですが、
icloudを開こうとすると、
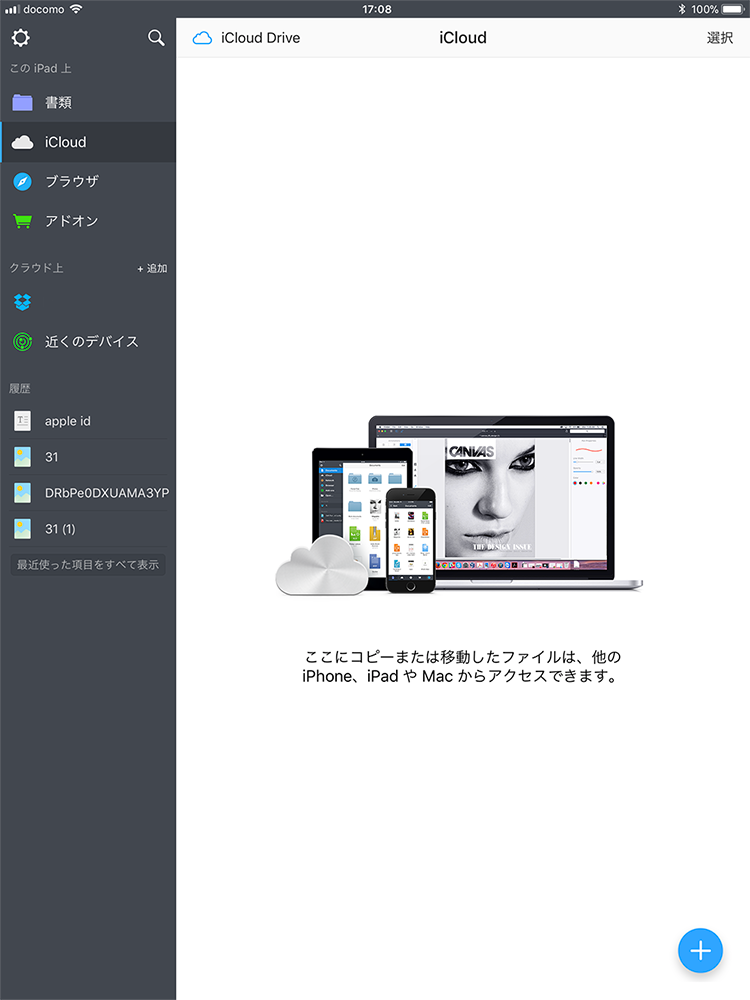
↑こんな感じでApple製品の写真が出てきて肝心のデータは見れない状態。
この問題を解決するにもネットには情報は乏しく、解決に結構時間を費やしました。
正解は、ただicloudにデータを入れただけれはDocuments6で見ることはできなく、
icloud内に作られたフォルダ、「Documents by Readdle」に
共有したいデータを入れないとダメという話。
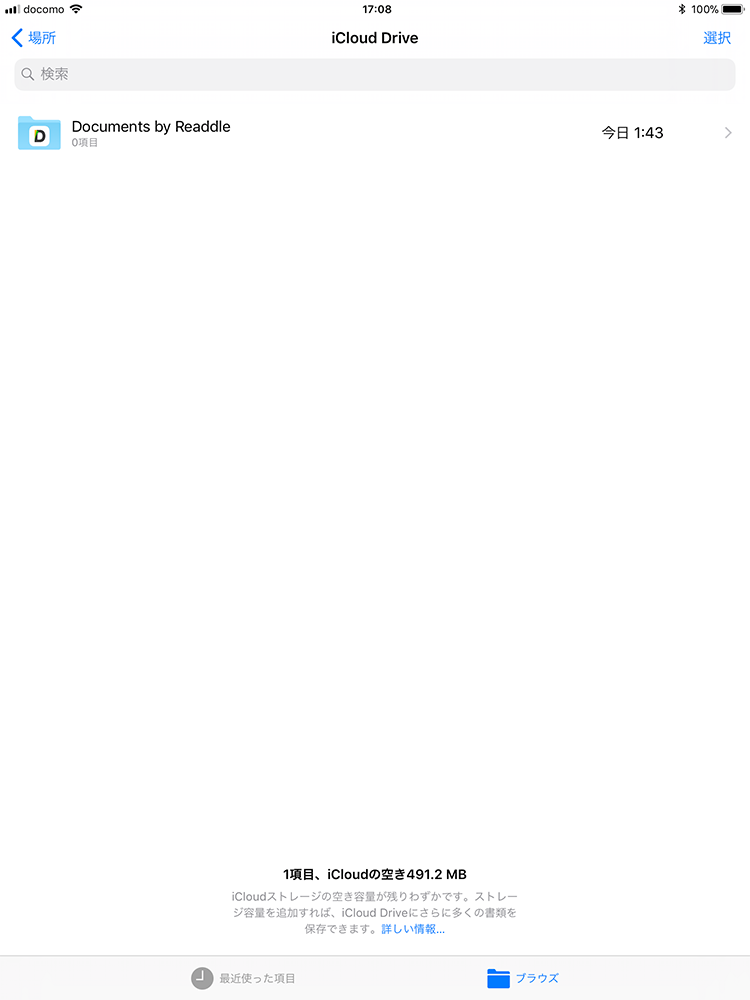
Windowsにインストールしたicloudのアプリで見ると確かに↑のフォルダが見えますし、
iPadに標準でインストールされている「ファイル」とアプリでみると、
確かに「Documents by Readdle」というフォルダが存在します。
このフォルダにデータをコピーすると閲覧可能になりました。
アプリで独自の領域を作らないと共有できない事実にちょっとがっかり(;´Д`)
あとドロップボックスの内容がどうも変。具体的に言うとぜんぜん更新されない。
これは同期をあえてユーザーが設定しないと最新情報を拾ってくれないらしい。
これもちょっと悩みました。
うーん、もっと良いファイラーないかな・・
ブラウザについてはChromeのios版をインストールすることで解決しました。
Windowsでも頻繁に使っているブラウザなんで違和感ありません。
ただブックマークをホームに出せないのは残念ポイント。
ナビ&地図に関してもGoogle Mapsが使えるので特に困ることはなさそう。
。

まだ動画再生あたりはTVerくらいしかしてないけど
なめらかに再生を確認しています。
Androidは再生プログラムのインストールをいくつか求めてきたのですが、
IOSはフジテレビオンデマンドを追加インストールするくらいでいけました。
いまのところ、こんなところかな
 2018.04.01 00:50
|
2018.04.01 00:50
| 



iPad Pro 10.5が届いた
2018.03.31

注文してから中1日で届きました。
意外と早かったですね。
今回注文したのは64GBのシムフリー。
容量は一番小さいモデルですが、
それでも今までのZ4タブよりは
多く使えるだろうと思って妥協しました。
256GBはドカンと跳ね上がって高いですからね。
proの代名詞であるペンも注文していたのですが、
到着はかなり先。04/10~04/27に到着予定とか。
長い(;´Д`)
今日一日、設定を行なっていたのですが、
いままでAndroidのシキタリにどっぷりだったので
全然捗りません。
過去にiosに触れたのはAU版iPhone4を脱獄し
シムロック解除して遊んだくらい。
実際に運用したことはないっす。
そんなんだから手際よくなんて出来るわけがない(;´Д`)

弄っていてわかりましたが、
2日前に公開された11.3がすでに入っていることに驚き。
仕事早すぎでしょう。
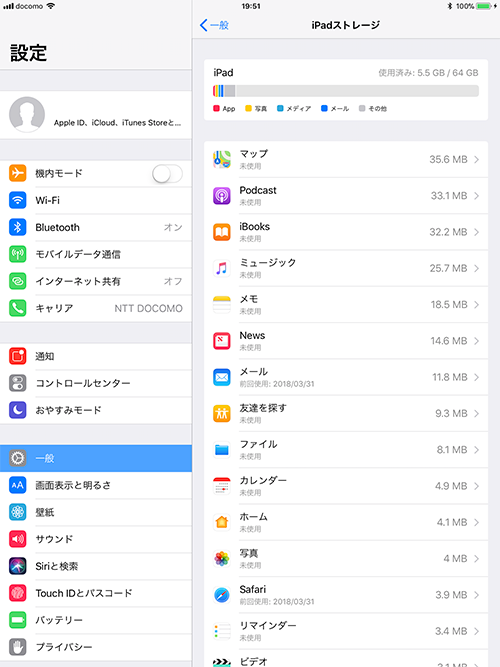
あと、iosはあまり容量を食っていない模様。
15GBくらいは軽く食っているイメージでいましたが、
結構スマート。こりゃ64GBで余裕かも。
ケースがまだ到着してないので雑には使えないけど、
明日は仕事の合間が多いのでその時に
Z4タブレットで使っていたアプリを入れ込むかな。
iPad Pro 10.5用のカバーを考える。ただしペン対応で
2018.03.30

条件は、軽量であること。
寝ながら使うこともあるので、薄ければ薄いほど好ましい。
そしてペンホルダがついていること。
この3点。
ではAmazonで売っているものから
1つずつ調査していきましょうかね。
==================================
iPad Pro 10.5 ケース iDudu Apple iPad Pro 10.5インチ保護ケース
手持ち用バンド&Apple Pencil ケース付き
税込666円
メチャクチャ安いこの商品
安いから中国発送と思いきや、Amazonの倉庫から発送のようで、
安い物をすぐ欲しい人には最適か。
軽量で見た目も悪くないけど、
折りたたんだ時にスキマができるというコメントあり。
ペンは脱着するバンドのポケットに挿し込む仕様。
ペンのポケットはゆるゆるで蓋を締めても落ちるというコメントあり。
基本的にペンは板側に出っ張る様になるので
バッグの中で圧を掛けられたらペンのせいで液晶が割れそう。
ダメ要素が多すぎてイマイチ感が尋常じゃない(;´Д`)
==================================
Pro 10.5ケース AUAUA iPad Pro 10.5 カバー
税込1,799円
なかなかに軽量薄型。色も4種類選べて好みのものがありそう。
オートスリープ機能付きで、滑り止めグリップもついて
最低限の機能はしっかり備わっています。
しかも防護フィルムもオマケでついてくる所が嬉しい。
ペンソケットが側面についているので
板に出っ張りがありません。
バッグの中にいれても、
圧力で液晶が割れるということは確率低そう。
本体をはめるところが柔らかい素材でできているので
傷がつきにくい仕様。
縫製もあって高級感がありますね。
残念なところは4スピーカーはカバーされてないのに、
スイッチはカバーされていて使いにくい所。
でもサイドスイッチはほとんど使うことがないので
あまり問題なさそう。
==================================
iPad Pro 10.5 ケース iVAPO
ApplePencil収納 スタンド機能付き
税込2,799円
ネットのレビューではこの商品を奨めている方が多いですが、
確かに良い点が多い商品ですね。
12ヶ月保証がついてるのが魅力。
ペンは柔軟性のあるケースに収まるようになっていて
取り出すときは背面から指で押すことで取り出せる親切設計。
キャップも別に収納できるようなっています。
ただそのせいで、幅が少し大きい。
ペンを充電する時にケースと干渉するのも残念ポイント。
==================================
iPad Pro 10.5 ケース Ztotop
高級PUレザーケース オートスリープ機能付き ペンソケット付き
税込1,799円
革感たっぷりで高級感ありあり。
簡単に開かないように、ゴムバンドで留めることも可能。
薄くて軽いので頻繁に持ち歩くのに向いてそう。
ただ本体を留めるのはポリカーボネートのケースなので、
脱着ですこし傷がつきやすいかも。
外側にポケットが有るのが他の製品とはちょっと違う所。
==================================
Brusmo iPad Pro 10.5 専用ケースカバー
スタンド角度調整機能 オートスリーブ機能 タッチペンホルダー付き
税込1,999円
ケースはTPUゴムで出来ているので
本体に傷は付きにくそう。
iVAPOと同じくケース内にペンを収納するタイプで
ほぼ同じような仕様。
ただ色のバリエーションが個人的に好みじゃないものが多い。
iVAPOもそうだけど、このタイプは
寝ながら使うという用途にはちょっと厳しそう。
==================================
Jisoncase ipad pro 10.5 ケース pencilホルダー付
茶:税込2,790 黒:税込2,590円
これは私の求めるものとはちょっとかけ離れてるかな。
ペンが側面じゃなく板に挿さる仕様なので、
荷物の多いバッグには怖くて入れられない。
==================================
さて、いろいろ特徴ある商品があったけど、
私が選んだのは。上で紹介したコレ
Pro 10.5ケース AUAUA iPad Pro 10.5 カバー
税込1,799円
寝ながら見るとき
ペンがプラプラして邪魔になりそうだけど、
その時は外せばいいだけなので、
それほど不便ではないかな。
使ってみないと本当のところは見えないけど、
とりあえずコレを注文してみます。





