エクストルーダーに接続部品なし。
2017.10.04
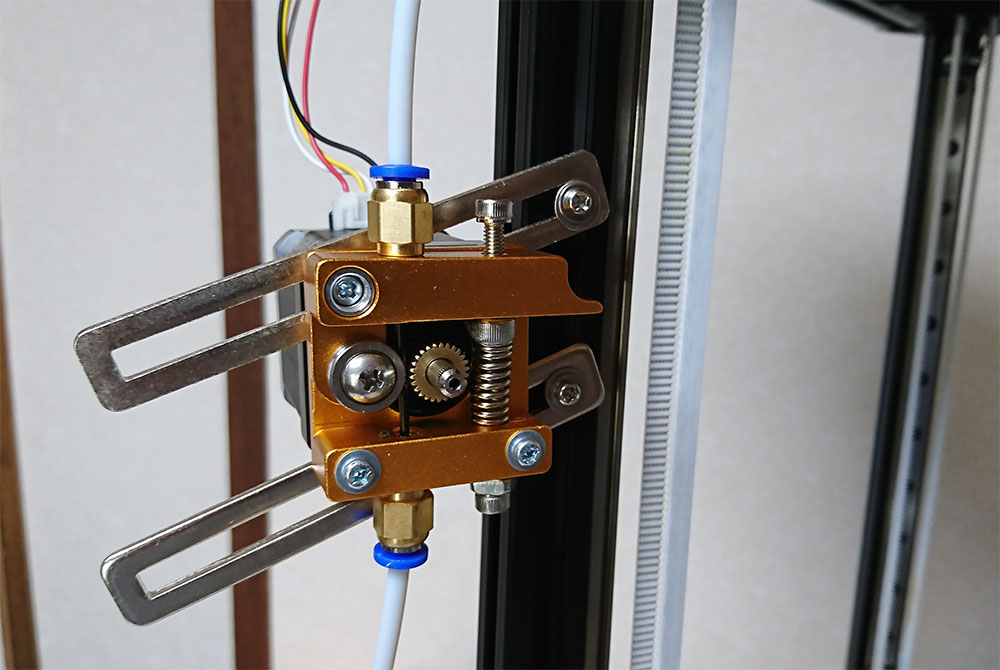
エクストルーダーが破損したので
早急にメタル部品を取り寄せたのですが
送料込み350円という安さ故か、
デルタに取り付けるパーツが同梱されてませんでした。
もちろん発送者のミスではなく
商品写真にも写っていないので、
私の確認不足です。
(っていうか改めて見直しても付属している商品がなかった。)
とりあえず間に合わせに金属プレートで接続してますが、
やっぱり見栄えが悪いですね。
ここも改装前に部品を印刷しておきましょう。
部品は自作じゃなくて
https://www.thingiverse.com/thing:2056016
ここからダウンロードしたもの。
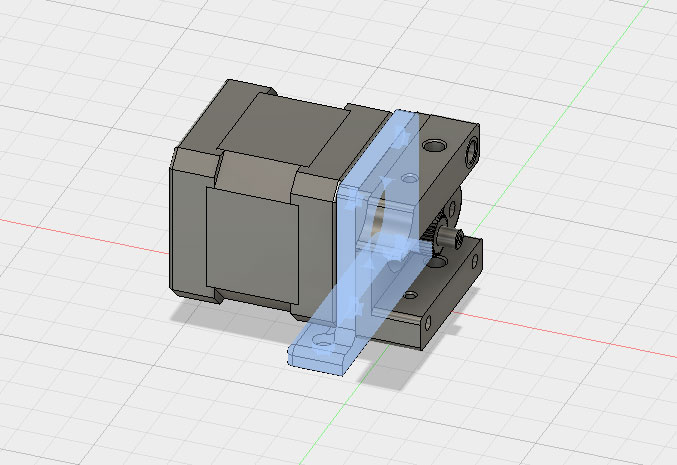
↑問題なく付きそう。
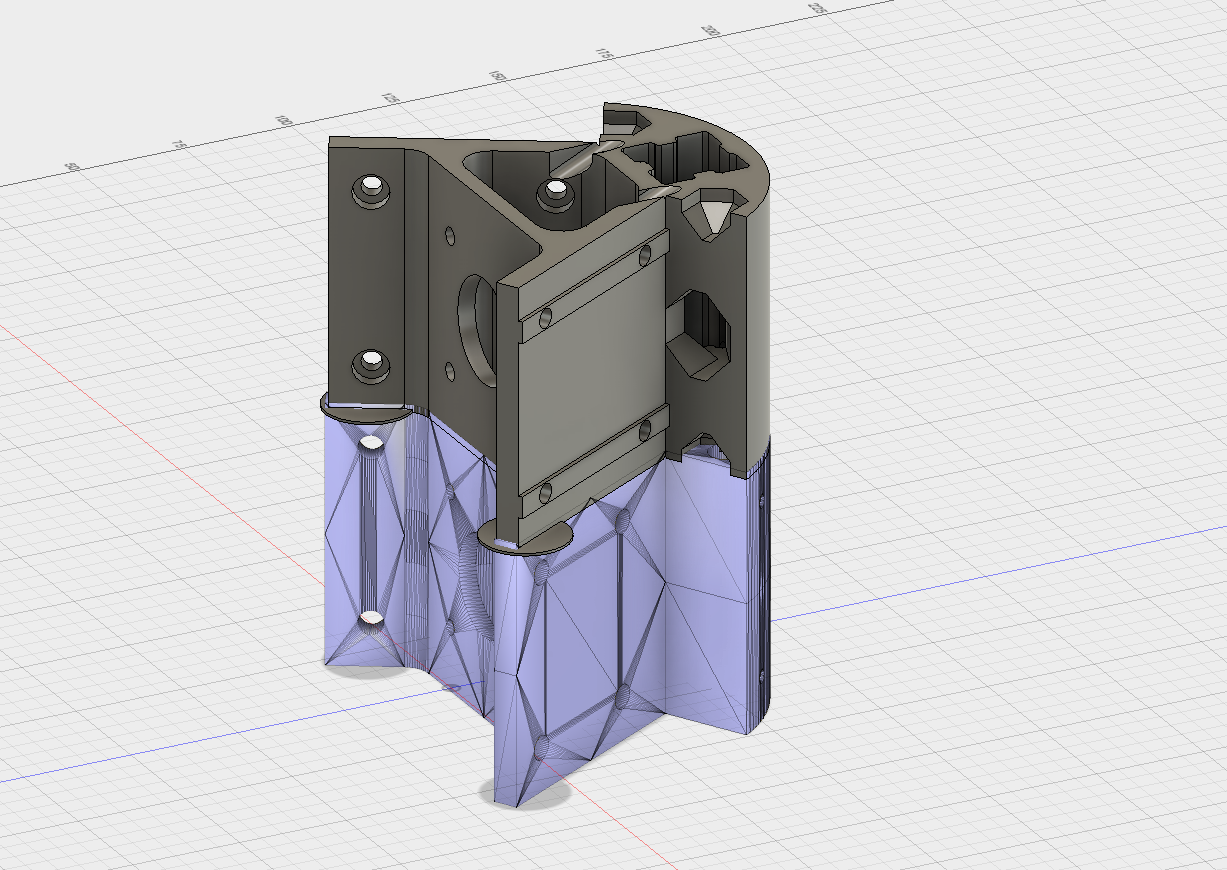
モーターは結構重いので
使っていく内に積層割れや折れなんぞが起きたら嫌だなと思い、
反り覚悟でInfill100%で印刷。
精密部品じゃないので反りよりも強度優先ですよ。

(*´∀`)b イイネ!
 2017.10.04 00:25
|
2017.10.04 00:25
| 


メタルのコーナーパーツについて
2017.10.03

削りだしのコーナーパーツが届いた。
アルミだと思うがなかなかの重量感。剛性が高そう。
ただしバリがすごい。
特にネジ穴については削った後の処理が皆無でした。
さすが中華クオリティ。
そのままでは使えないので、自分でカットしましたよ。
今までのコーナーパーツと、今回のコーナーパーツで
縦柱と横柱の関係性がどれほど変わるのかが気がかりでした。
3Dデータで検証してみたところ、
完全一致。
計算上は、Radiusも変わらないでそのままいけますね。
光学エンドストップの台座を作成
2017.10.02
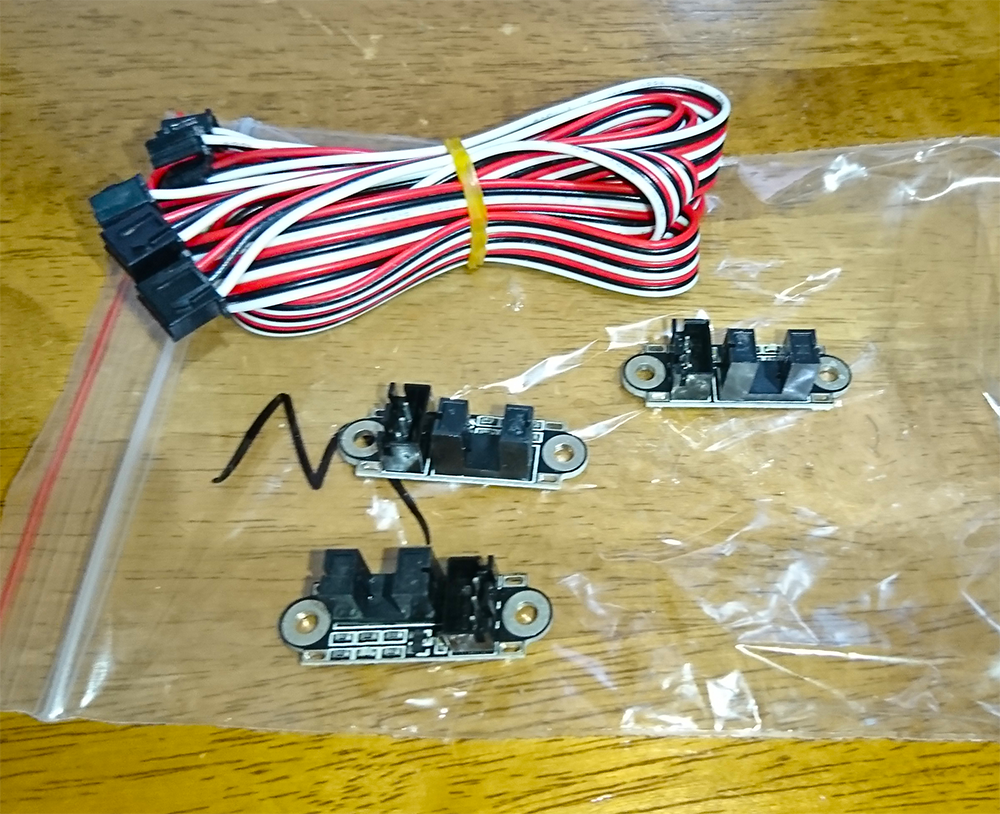
発注してたオプティカルセンサーが届いたので
台座を作成しました。
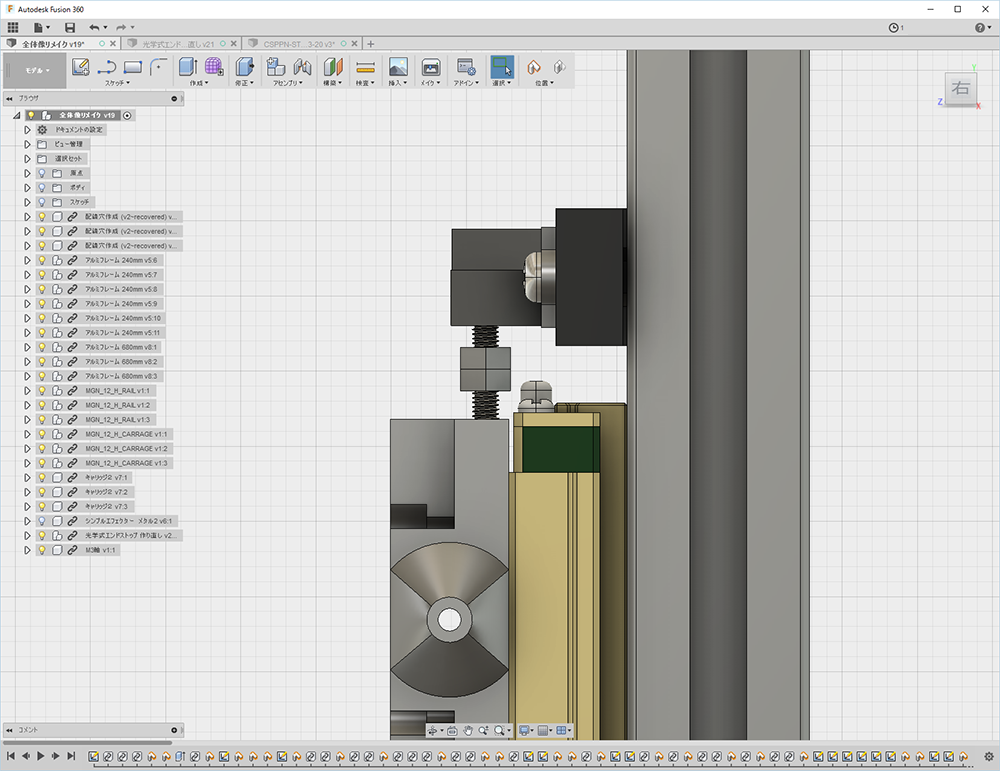
ピンの位置を正確に把握しなくてはならないので
部品を3D化して寸法を出しました。
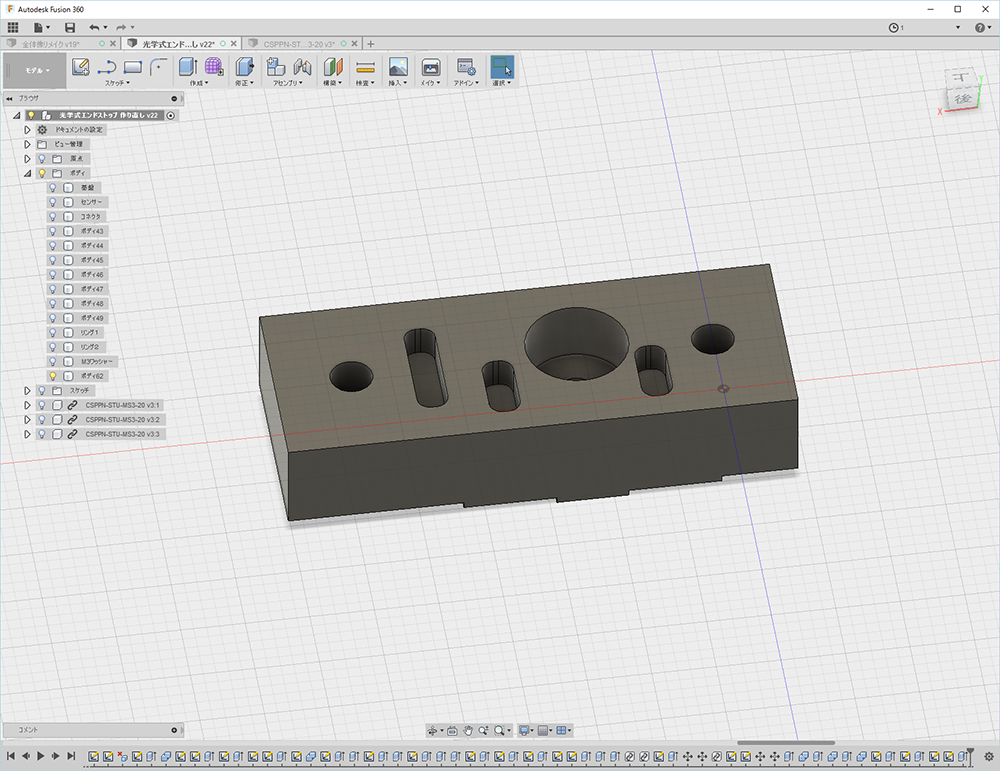
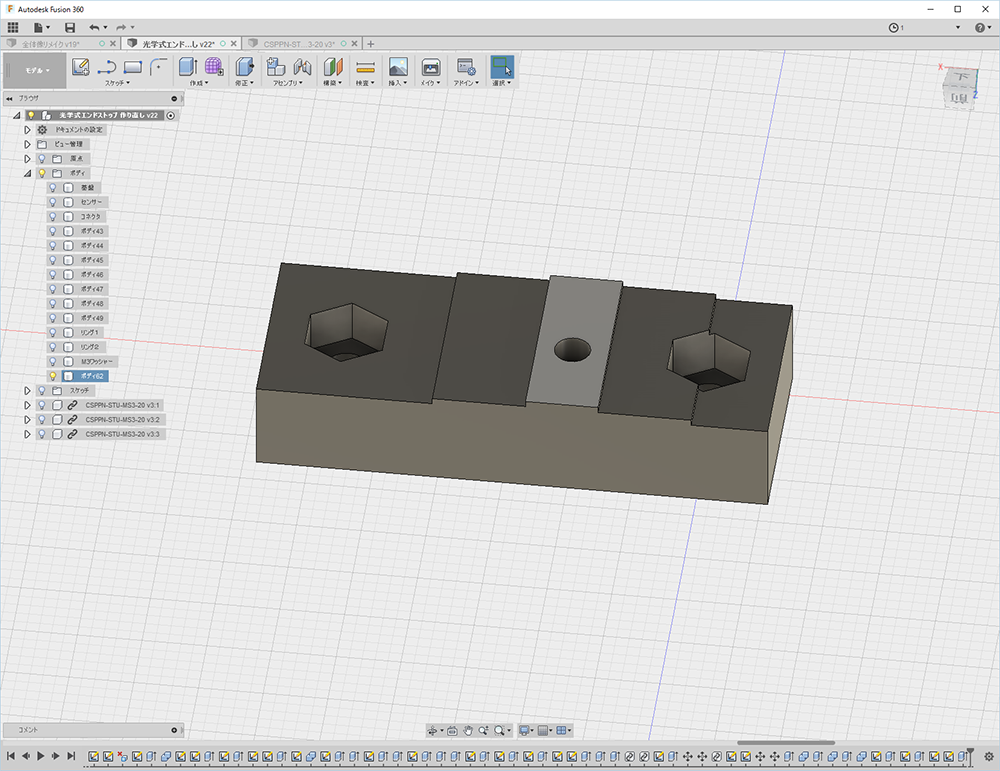
左が表、右が裏。
実際に付けてみたイメージがこちら↓
キャリッジに取り付けている棒は
M3ネジ20mmの頭をカットしたもので、
ラジペンやスパナで回転させやすいように
中央にナット2個を接着したもの。
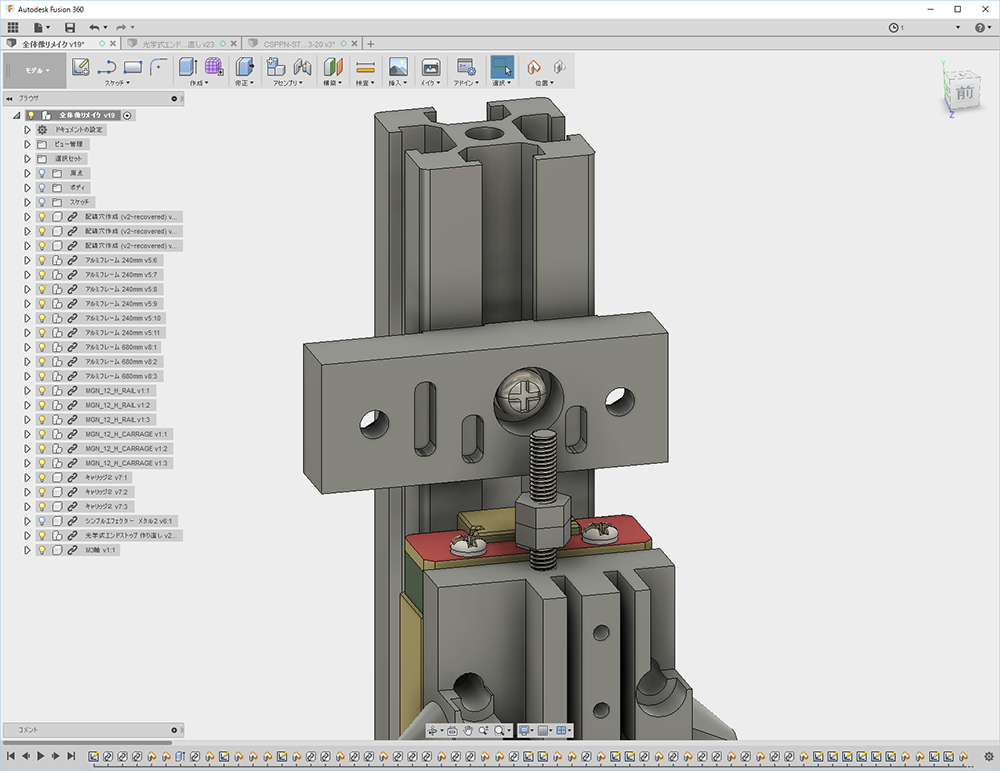
そんでもって、オプティカルセンサーをつけたイメージがこちら↓
制作に半日かけただけあって、手抜きはありませぬ。
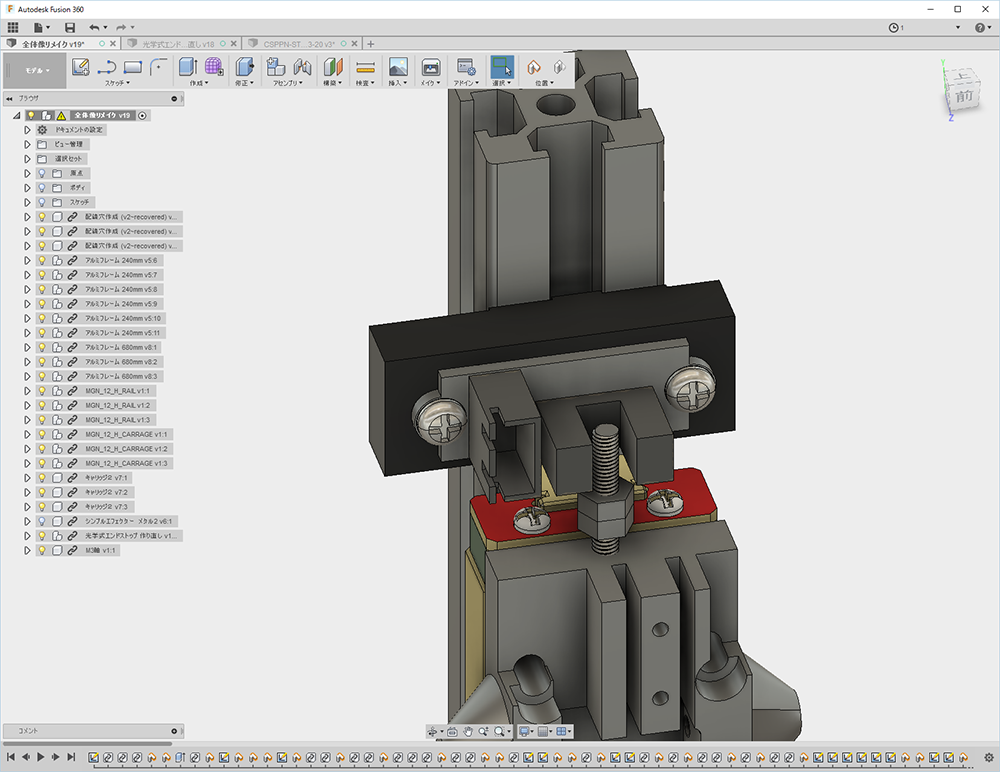
横から見るとこんな感じ↓
早速印刷。1個当たり約30分ナリ。

↑0.1mm積層でテスト。
↓調子に乗って次は0.05mm積層。1個あたり1時間ジャストナリ
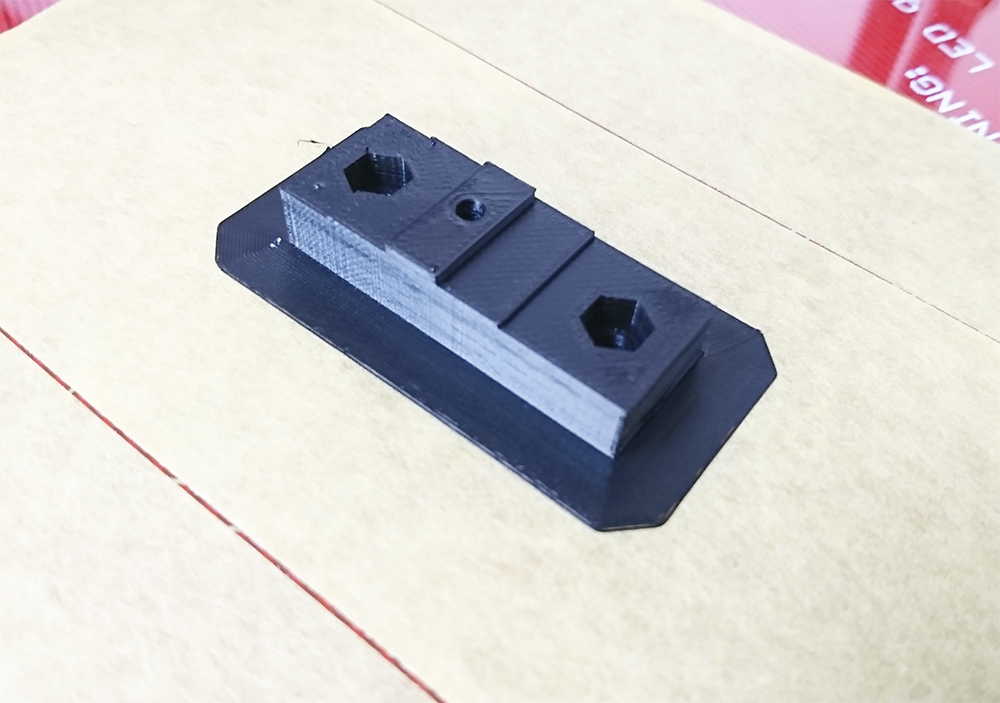
ちょっと作りが雑かな。ロッドの調整をした直後だったし、
フィラメントの銘柄を変えたので、
ファームの設定とスライサーの調整が必用だね。
でも細かい調整は交換パーツが全部そろって
換装してからにしよう。
とりあえず今回はこれでよし・・(;´∀`)
さて、仮組みをしてみます。


寸法もピッタリで問題ない感じ。
センサーの背面にあるハンダの突起も予定してた窪みに収まって、
いい具合に収まっています。

↑ベルトと干渉するかを調べてみます。
ギリギリセーフですね。
ベルト位置は3Dで厳密に確認していなかったので少し心配でした。
ひとまず安心です。
これらはコーナーパーツをを金属に交換する時にまとめて変更しますよ。
今はその下準備です。
ロッドの補正治具を作成。
2017.09.29
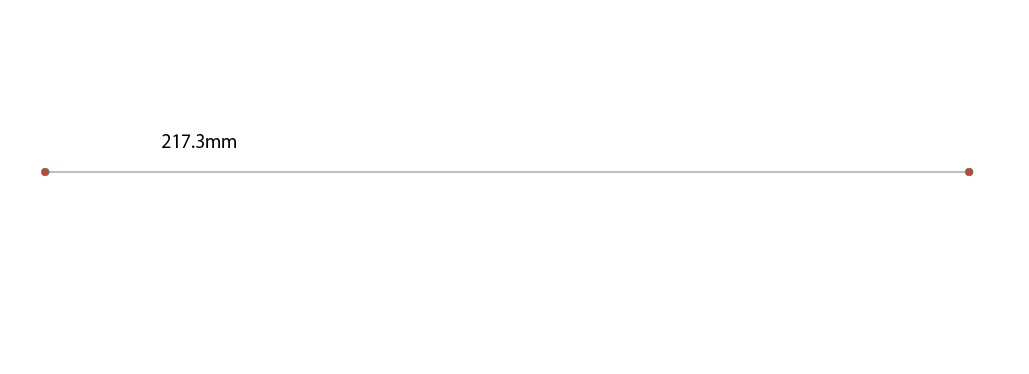
↑こんなものを紙に原寸印刷して
ロッドの長さを調整していたのですが、
目視なので0.xレベルの微調整ができたとしても
0.0xレベルでは神業じゃないとできません。
しかも6本全部を全く同じにするとなると
治具なしでは不可能です。
この差が印刷品質にどこまで影響するかなんて
当事の自分には全くわかっていませんでしたが、
今ならわかります。この重要性が(; ・`д・´)
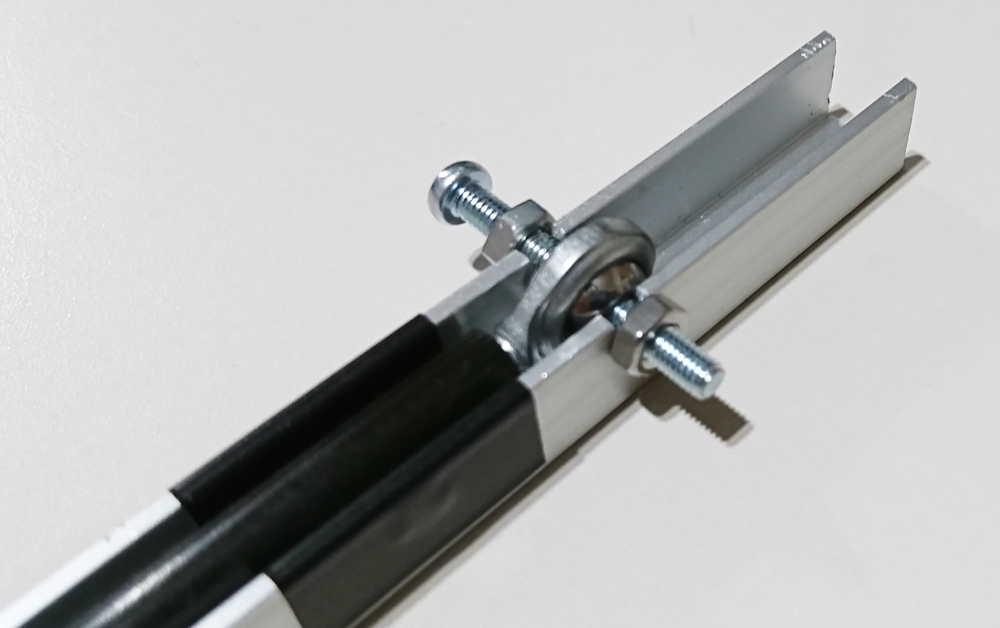
というわけで簡易的ではありますが調整用治具を作りたいと思います。
余っていた廃材でコの字型をした
1cmx1cm厚み1.6mmのアルミがありましたので、
それを利用した設計。
左は治具の全体図。右はロッドを填めてみたイメージ。

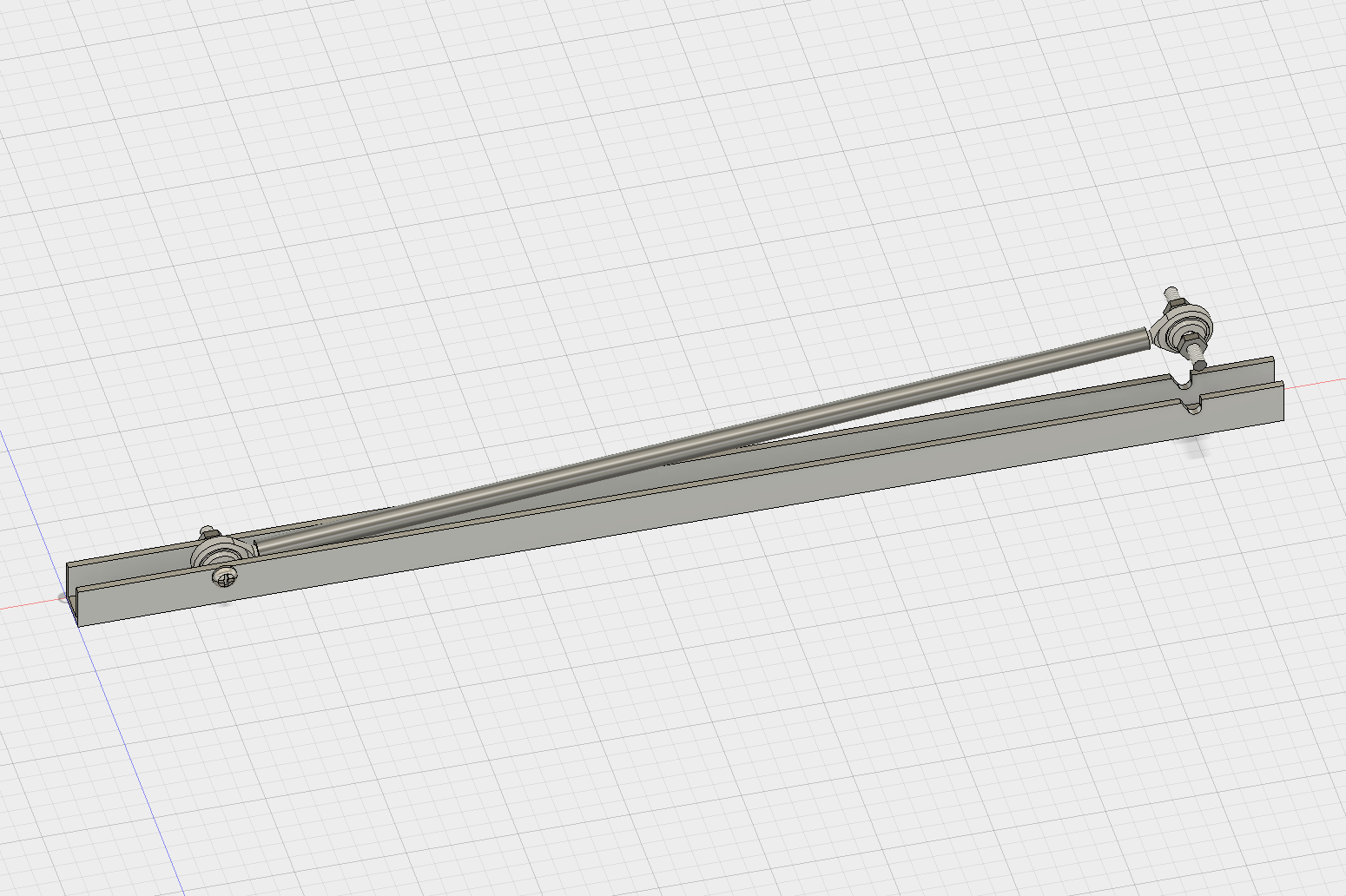
ロッドエンドの片側をねじ固定ではなく
接着剤でくっつける方式にして、
治具に押し付けて長さを確定させます。
上面からみるとこんな感じ↓

治具とロッドとの間にスキマがあるので、ロッドが踊らないように
厚紙かそれに近い素材をスキマを埋めます。
実際に加工した写真がこちら↓
穴はハンドドリルではなく、小型フライスであけたので正確です。
斜めのカットはヤスリで削りましたが・・
作成のポイントはM3のネジを通すのに
M3のドリルを通してはネジが貫通してしまいます。
ヘタをしたら、ドリル刃のブレで大きめの穴が開いてしまうかもしれません。
そうならないように、一回り小さい刃であけて、
タップでネジを切ってます。そうすることでガタの無い穴があきます。


Good(๑´ڡ`๑)
唯一の弱点は両端のロッドエンドの傾きを一致させるのが面倒なことですね。
接着剤が固着するまでの時間に傾きを正さないといけません。
まぁ、印刷範囲を限界まで広げてないので、
ざっくり調整でいいと思いますが、
目視ではきちんと一致しているように調整しました。
光学エンドストップの調査
2017.09.28
前々からエンドストップ用にストックしていた
オプティカルスイッチの採用をやめ、
別のタイプを発注していたのですが、
(理由はセンサーのスキマが狭すぎてM3ネジが入らないから
新しく発注したのはM4ネジでも入るほど幅が広い)
それが届く前に、配線の類や設定等を
事前に調べておきたいと思います。
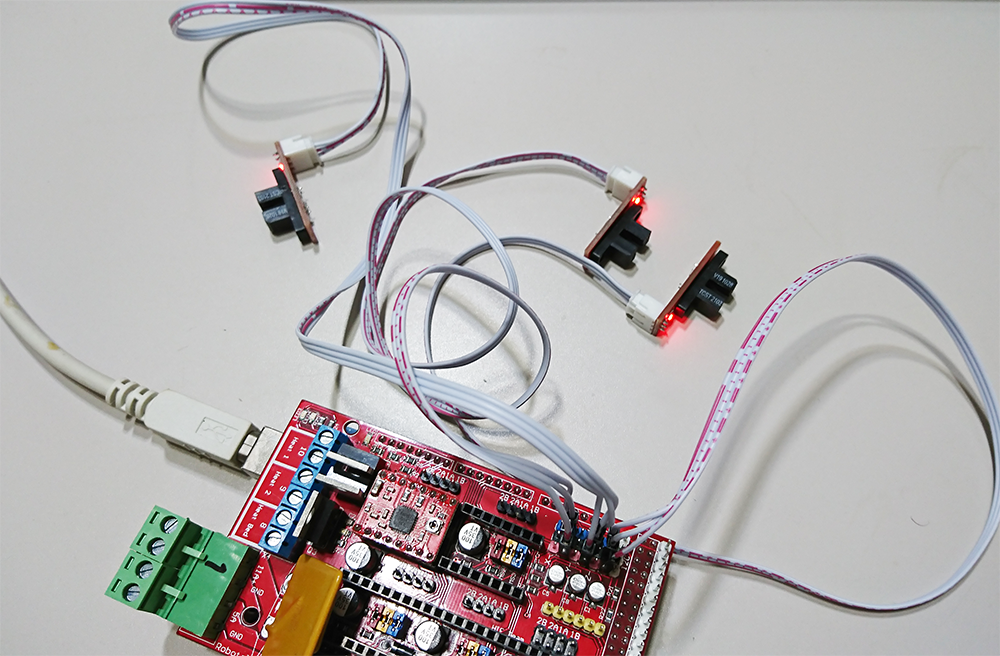
予備のArduino + Ramps1.4があるので
それを使って実験してみますよ。
板バネスイッチの配線は2本。
オプティカルスイッチの配線は3本
そのまま挿し替えるというわけにはいかないですね。
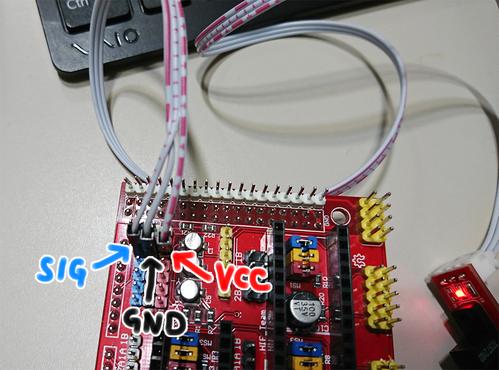
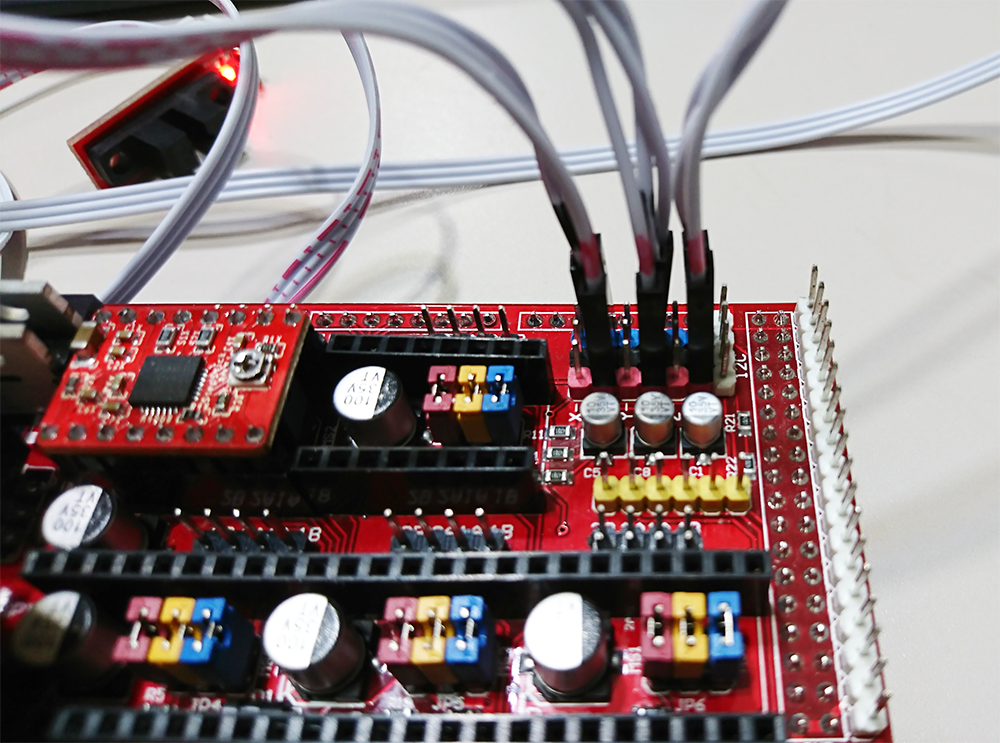
調べた結果、↓このような配線が正解らしい。
オプティカルスイッチの基盤に書いてあるVCCをRampsの赤に
GNDを黒に、SIGを青に。
以前、このピンでショートさせ
5Vのレギュレータを飛ばしてしまったトラウマがあるので
接続するには少々勇気がいったのですが、
USBを接続しても燃えないことを確認(;´∀`)
↓動作確認ランプが煌々と光ってますよ。

X軸、Y軸、Z軸の3つはこのように配線しますよ。
一列でもズレるとMarlinの設定から外れ
正常に動かなくなるので慎重に位置確認して挿します。
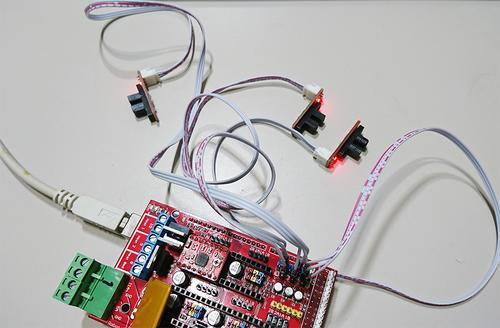
↑3本ともランプが光ってますね。
致命的なミスは無いようです。
次は動作確認をしてみます。
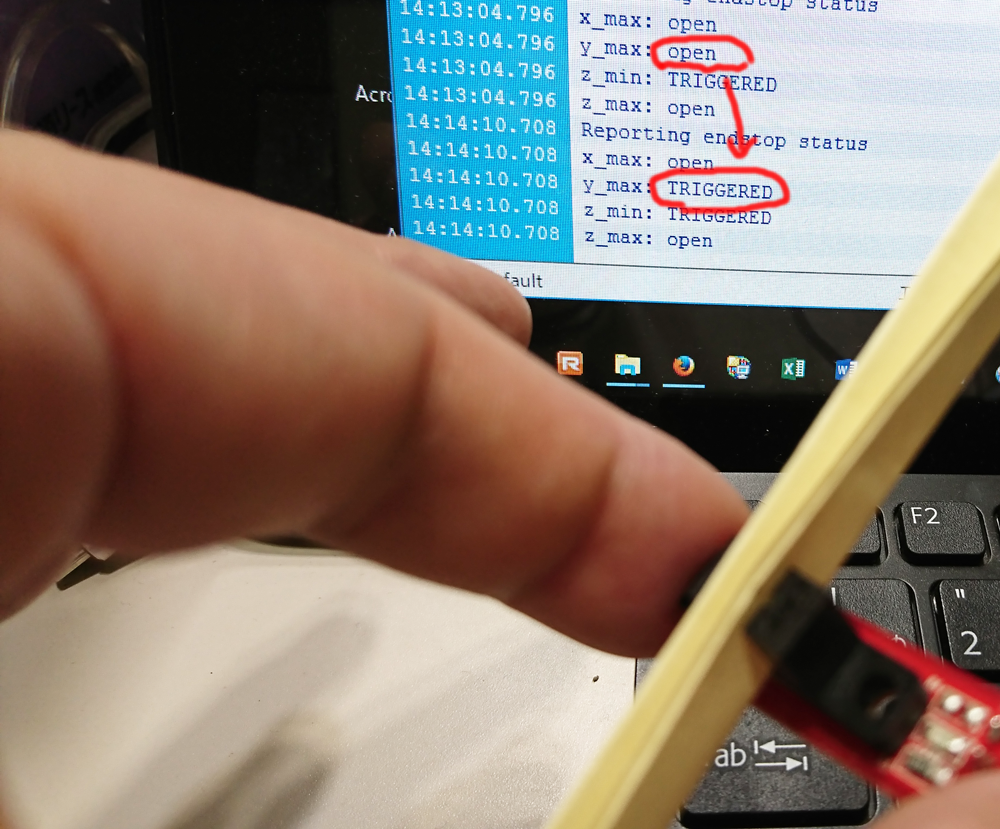
Repetier-Hostから、M119コマンドを発行してみますよ。
x_max: open
y_max: open
z_max: TRIGGERED
z_max: open
ん?ん? デフォルトがopen? (ΦωΦ)ニャ?
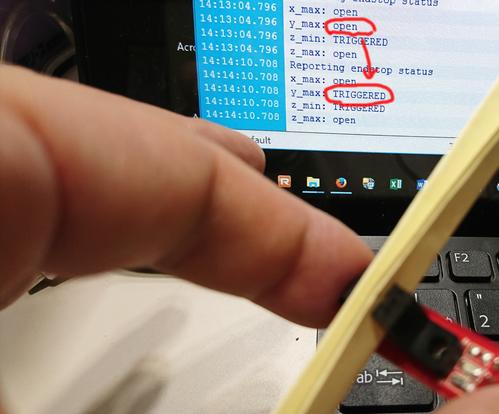
Y軸のオプティカルスイッチの間に
紙を挿し込んでM119を発行してみると・・
x_max: open
y_max: TRIGGERED
z_max: TRIGGERED
z_max: open
きちんと反応してる。
てか、バネ式スイッチと全く同じじゃん!
予想では設定を反転させなきゃいけないと
踏んでいたんですが・・
Marlinの設定について、何もいじることなく、
デフォルトのままでいいのですが、
あえて、その部分の設定をメモしておきます。
#define X_MIN_ENDSTOP_INVERTING false
#define Y_MIN_ENDSTOP_INVERTING false
#define Z_MIN_ENDSTOP_INVERTING false
#define X_MAX_ENDSTOP_INVERTING false
#define Y_MAX_ENDSTOP_INVERTING false
#define Z_MAX_ENDSTOP_INVERTING false
↑この設定がFalseからTrueになっていた場合Falseに戻す。
オプティカルスイッチの採用をやめ、
別のタイプを発注していたのですが、
(理由はセンサーのスキマが狭すぎてM3ネジが入らないから
新しく発注したのはM4ネジでも入るほど幅が広い)
それが届く前に、配線の類や設定等を
事前に調べておきたいと思います。
予備のArduino + Ramps1.4があるので
それを使って実験してみますよ。
板バネスイッチの配線は2本。
オプティカルスイッチの配線は3本
そのまま挿し替えるというわけにはいかないですね。
調べた結果、↓このような配線が正解らしい。
オプティカルスイッチの基盤に書いてあるVCCをRampsの赤に
GNDを黒に、SIGを青に。

以前、このピンでショートさせ
5Vのレギュレータを飛ばしてしまったトラウマがあるので
接続するには少々勇気がいったのですが、
USBを接続しても燃えないことを確認(;´∀`)
↓動作確認ランプが煌々と光ってますよ。
X軸、Y軸、Z軸の3つはこのように配線しますよ。
一列でもズレるとMarlinの設定から外れ
正常に動かなくなるので慎重に位置確認して挿します。
↑3本ともランプが光ってますね。
致命的なミスは無いようです。
次は動作確認をしてみます。
Repetier-Hostから、M119コマンドを発行してみますよ。
x_max: open
y_max: open
z_max: TRIGGERED
z_max: open
ん?ん? デフォルトがopen? (ΦωΦ)ニャ?
Y軸のオプティカルスイッチの間に
紙を挿し込んでM119を発行してみると・・
x_max: open
y_max: TRIGGERED
z_max: TRIGGERED
z_max: open
きちんと反応してる。
てか、バネ式スイッチと全く同じじゃん!
予想では設定を反転させなきゃいけないと
踏んでいたんですが・・
Marlinの設定について、何もいじることなく、
デフォルトのままでいいのですが、
あえて、その部分の設定をメモしておきます。
#define X_MIN_ENDSTOP_INVERTING false
#define Y_MIN_ENDSTOP_INVERTING false
#define Z_MIN_ENDSTOP_INVERTING false
#define X_MAX_ENDSTOP_INVERTING false
#define Y_MAX_ENDSTOP_INVERTING false
#define Z_MAX_ENDSTOP_INVERTING false
↑この設定がFalseからTrueになっていた場合Falseに戻す。





